Совместное развитие сенсорики и робототехники
Метод, основанный на отслеживании признаков (Feature tracking), таких как линии, углы или определенные области в видеопоследовательности. Отслеживание и поиск относительных изменений в положении выделенных признаков позволяют определять траекторию движения робота. На сегодняшний день развитие систем компьютерного зрения позволяет распознавать не только частичные признаки изображения, но и все изображения в реальном времени. После этого робот обходит препятствие либо с помощью классических алгоритмов, либо благодаря обучению с подкреплением.
Автономная навигация БПЛА
В случае с БПЛА речь чаще всего идет о навигации вне помещения (на местности), хотя по мере миниатюризации летающих роботов растет число коммерческих приложений и для использования внутри помещений. Например, облеты оборудования с целью мониторинга на атомной станции.
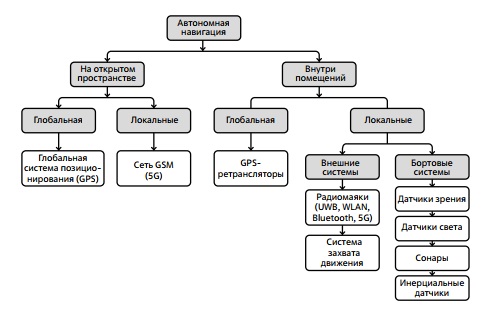
На рис. 4.38 показаны виды датчиков, которые обеспечивают навигацию БПЛА в открытом пространстве и внутри помещений.
Навигация вне помещений
БПЛА, предназначенные для навигации автономных полетов на местности, в основном ориентируются по спутниковой системе навигации GNSS, на бортовую инерциальную систему для уточнения ориентации дрона в пространстве, а также на другие датчики (как правило, камеры) для картирования местности и предотвращения столкновений.
Преимущество GNSS включает круглосуточную доступность и достаточно хорошую точность определения местоположения по всему миру. Недостатком является то, что сигналы GNSS ослабляются внутри помещений, а также по-разному отражаются от различных поверхностей рельефа, некоторыми материалами полностью экранируются, а потому обычно не подходят для навигации в помещении без использования ретрансляторов.
Имеется возможность использования сигналов сотовой связи в качестве дополнительных и альтернативных сигналов по отношению к глобальным навигационным спутниковым системам. В частности, как показано на рисунке, перспективными являются навигационные системы, на базе сигналов сотовой связи 5G.
В качестве альтернативы триангуляционным методам может использоваться визуальная навигация. Для задачи локализации БПЛА на местности применяются методы визуально-инерционной одометрии, визуального SLAM (одновременной локализации и картирования), с использованием камер и специальных компактных лидаров - последних куда реже в связи с их большим весом и высокой стоимостью.
Навигация внутри помещений
Навигация в помещениях является более сложной из-за ограниченного пространства и наличия препятствий. Говоря о глобальных системах позиционирования, следует отметить: несмотря на то что прием сигнала GNSS в закрытых пространствах затруднен, можно генерировать сигналы GNSS с помощью псевдоспутников (стационарных GNSS излучателей с меньшей мощностью сигнала и радиусом действия), установленных в углах помещения.
Методы локальной навигации могут быть разделены на методы, использующие внешние сигналы (реализованы с помощью радиомаяков или трекеров движения), а также с помощью датчиков, имеющихся на борту БПЛА, таких как инерциальная система навигации, ультразвуковые датчики, датчики света, а также системы компьютерного зрения, получившие существенное развитие в последнее время (рис. 4.38).
Инерциальная система БПЛА обеспечивает измерение ускорений летательного аппарата и его угловых скоростей относительно трех осей БПЛА, с тем чтобы на основе этих данных определить местоположение аппарата, его скорость и другие параметры. В состав инерциальной системы навигации входят акселерометры, считывающие линейное ускорение, и гироскопы, позволяющие определить углы наклона БПЛА относительно основных осей: тангаж, рысканье и крен. Для определения ориентации дрона также используют магнитометр. Датчики зрения имеют преимущества перед другими методами локализации в помещении, так как незначительно увеличивают вес робота (большинство БПЛА уже оснащены бортовыми камерами) и не требуют высокого разрешения самих камер из-за близости всех препятствий и стен к дрону. Системы машинного зрения дают возможность получения деталей изображений окружающей среды, которые могут параллельно использоваться для ненавигационных приложений (наблюдение, архитектурная съемка, реконструкция, фотограмметрия и т. п.).
Автономная навигация подводных роботов
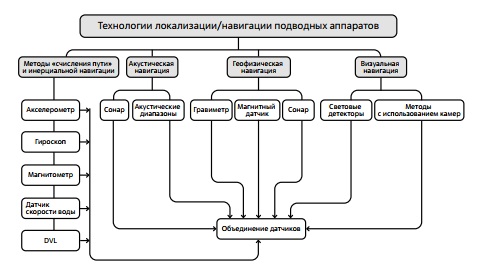
Водная среда накладывает свою специфику в выборе технологий для навигации роботов. Использование GPS/ГЛОНАСС под водой невозможно, поскольку в воде электромагнитные волны затухают и связь со спутником нарушается. Для навигации подводных роботов используются четыре основных метода - это метод счисления пути, дополненный инерциальными датчиками, акустический, геофизический и оптический (см. рис. 4.39).
Методы счисления пути, дополненные другими датчиками
Метод счисления пути, который мы уже упоминали, - это простейший способ получения положения движущегося транспортного средства путем интегрирования его скорости по времени. Инерциальные датчики, используемые в данной технологии, мы упоминали, говоря о беспилотных летающих аппаратах, описав роль акселерометра и гироскопа в подобных системах. На рис. 4.39 отмечены также магнитометры и датчики DVL (Doppler Velocity Log). Магнитометр - это датчик, используемый для измерения напряженности и направления магнитного поля в подводной среде для определения ориентации и курса подводного аппарата относительно магнитного поля Земли.
DVL, или доплеровский 17Эффект Доплера - изменение частоты и, соответственно, длины волны излучения, воспринимаемой наблюдателем (приемником), вследствие движения источника излучения относительно наблюдателя. Если источник волн догоняет испускаемые им волны, то длина волны уменьшается. Если удаляется - наоборот. гидроакустический лаг - это акустический датчик, оценивающий скорость аппарата относительно морского дна путем посылки импульса вдоль минимум трех акустических лучей, направленных в разные стороны. Принцип действия прибора основан на измерении смещения частоты отраженного от дна сигнала, излученного подводным аппаратом.
Инерциальные системы навигации склонны к дрейфу точности (накапливают ошибки интегрирования).
Дополнительные измерения с использованием доплеровских датчиков скорости, позволяющие уточнять скорость аппарата на основе эволюции изображения морского дна, дают возможность снизить ошибки в определении местоположения подводного аппарата.
Акустическая навигация
Акустические сигналы лучше распространяются в воде по сравнению с радио- и электромагнитными, что стимулирует использование акустических транспондеров 18Транспондер (transponder) - это устройство, которое, получив сигнал, посылает в ответ другой сигнал для навигации AUV. Среди методов навигации на основе акустических сигналов можно выделить сонары (SONAR 19Sound Navigation and Ranging Сонар или гидролокатор ) и акустическую дальнометрию (acoustic ranging).
Сонары, или гидролокаторы - это средство звукового обнаружения подводных объектов с помощью акустического излучения. Различают сонары бокового и переднего обзора. Оба типа используются для обнаружения объектов, которые необходимо обходить (избегая столкновений) во время подводной навигации. Это могут быть подводные скалы, изменения рельефа морского дна, транспортные средства или морские животные.
Акустическая дальнометрия подразумевает, что подводный аппарат оснащается акустическим передатчиком, который устанавливает связь с набором гидрофонов 20Гидрофон - специализированный микрофон для приема звука и ультразвука под водой. Применяется в гидроакустике как для прослушивания подводных звуков, так и для измерительных целей. Некоторые гидрофоны способны не только принимать, но и передавать звук, которые закрепляются в подводных точках известной локации (например, на буях или на базе какого-либо сооружения). Зная скорость распространения звука в подводном пространстве, можно рассчитать расстояние между подводным аппаратом и гидрофонами и определить положение подводного аппарата относительно группы гидрофонов.
Геофизическая навигация
Основная проблема метода счисления пути заключается в том, что ошибка определения местоположения растет со временем за счет дрейфа точности, под влиянием различных факторов. Использование геофизических карт для согласования измерений датчиков (геофизическая навигация) является вариантом решения проблемы дрейфа точности инерциальных систем. Суть метода состоит в том, что измерения датчиков согласуются с геофизическими параметрами, такими как магнитное поле, гравитационные аномалии, указанными на карте. Геофизическая навигация позволяет корректировать ошибку инерциальных навигационных систем и позволяет аппарату поддерживать требуемую точность определения положения без использования внешних датчиков, таких как GPS. Основным ограничением геофизической навигации является необходимость наличия карты, на которой отображают географические координаты мест с аномалией физических полей, которые могут быть измерены различными датчиками: акустическими, магнитными, гравитационными. Гравитационные аномалии могут быть измерены специальным датчиком гравиметром. Гравиметр - это высокочувствительный прибор для измерения вариаций гравитационного поля Земли. Например, над карстовыми воронками показания гравиметров становятся ниже, поскольку сила тяжести в этих местах меньше, и наоборот - над плотными породами руды показания гравиметров выше, так как над тяжелыми объектами сила тяжести возрастает.
Геомагнитная навигация опирается на магнитные датчики. Принцип работы датчика основан на чувствительности к очень слабому магнитному полю, которое окружает Землю. Местоположение аппарата определяется с помощью геомагнитной карты, которая привязана к географической.
Визуальная оптическая навигация
Оптическая навигация может быть реализована как с помощью камеры, так и с помощью массива оптических датчиков. Однако плохая передача света в воде ограничивает дальности действия систем формирования изображений.
Тем не менее известны решения, показывающие высокую точность навигации при использовании предустановленной инфраструктуры. Например, в работе [ "Источники использованной литературы" ] описаны оптические детекторные системы, способные оценивать положение, ориентацию и скорость движения беспилотного подводного аппарата относительно источника света, закрепленного под водой. Известны также системы искусственного зрения, используемые для обнаружения местоположения стыковочной платформы подводного аппарата. Данная система способна обнаружить набор ламп, расположенных вокруг желаемого места стыковки, используя метод бинокулярной локализации.
Альтернативным подходом (к использованию предустановленной инфраструктуры) является использование камеры или набора камер для определения особенностей окружающей среды или предмета слежения. Например, известны системы искусственного зрения для подводных аппаратов, позволяющие следить за объектом по его цвету.
Модуль слияния датчиков позволяет улучшить оценку состояния AUV путем обработки и объединения данных доступных датчиков. Следует отметить, что последние достижения в области алгоритмов объединения показателей датчиков способствуют разработке гибридных навигационных систем, которые используют преимущества различных методов для нивелирования недостатков отдельных технологий.
От изолированных роботов к подключенным
В данном разделе речь пойдет о сетевой робототехнике - практике использования сетевых технологий, позволяющих роботам участвовать в комплексных сетевых средах, объединяющих процессоры, датчики окружающей среды, мобильных и стационарных роботов и другие сетевые устройства.
Сетевые технологии открыли новые возможности управления роботами, предоставив возможность доступа к информации, находящейся за пределами восприятия отдельного робота.
К сетевой робототехнике можно отнести задачи построения системы, в которой оператор управляет сетевыми роботами, а также использование группы автономных роботов, которые общаются и работают вместе для выполнения задач, обмениваются информацией и даже делегируют задачи друг другу.
Сеть позволяет роботам обмениваться данными, информацией, синхронизировать действия и, возможно, получать доступ к вычислительным ресурсам или сервисам. Сетевая робототехника призвана обеспечить распределенный интеллект, совместное поведение и расширенные возможности за счет особых возможностей коллективной силы подключенных роботов.
Развитие таких сетевых технологий как облачные вычисления и интернет вещей привело к появлению облачной робототехники (Cloud Robotics) и "интернета роботизированных вещей" (Internet of Robotic things IoRT) ( рис. 4.40), о которых следует рассказать более подробно.
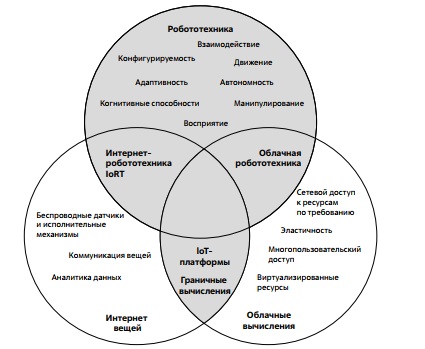
Рис. 4.40. Возникновение новых технологий на пересечении робототехники, облачных вычислений и интернета вещей
Источник: [ "Источники использованной литературы" ]