Среднесрочные прогнозы развития робототехники, технико-экономический анализ
Как мы отметили выше, технико-экономический подход в прогнозировании делает акцент на изучении фазы развития той или иной технологии, анализа времени выхода ее на рынок, изучения перспективности финансирования тех или иных технологий. Подобными исследованиям активно занимается компания Gartner, предложившая специальный вид диаграмм - так называемый "цикл ажиотажа" (Gartner Hype Cycle). Данные диаграммы показывают стадию развития той или иной технологии с точки зрения ее зрелости и с точки зрения ее субъективного восприятия профессиональным сообществом. В данной методике Gartner исходит из того, что каждая новация про- ходит пять различных стадий.
- Запуск - стадия, на которой сообщество узнает о новой технологии.
- Пик завышенных ожиданий - стадия, на которой общественность обращает внимание на технологию и начинает возлагать на нее чрезмерные ожидания.
- Впадина разочарований - этап, на котором пользователи выясняют, что те надежды, которые возлагались на технологию, не оправдались.
- Подъем осведомленно- сти - по мере того как люди адаптируются к новой технологии и по- является больше сведущих в ней специалистов, наступает призна- ние ее реальной пользы
- Плато продуктивности - стадия, когда технология становится стабильной и начинается стадия массовых внедрений.
"Цикл ажиотажа" Гартнера для категории "технологии робототехники"
Методика, предложенная компанией Gartner, весьма популярна и применяется не только аналитиками самой Gartner. В частности, Gartner дает аналитику в форме цикла ажиотажа только по категории "мобильные роботы и дроны", а авторы табл. 15.1 представили анализ состояния и перспектив развития основных технологий в логике цикла ажиотажа Гартнера по состоянию на 2023 год по всем областям робототехники.
| Этап в развитии технологии | Технологии данного этапа |
|---|---|
| Запуск технологии |
|
| Пик завышенных ожиданий |
|
| Впадина разочарований |
|
| Подъем осведомленности |
|
| Плато продуктивности |
|
По мнению авторов табл. 15.1, на пике завышенных ожиданий находится технология использования больших языковых моделей (LLM 1Большие языковые модели (LLM, Large Language Models) - это очень большие модели глубокого обучения, которые предварительно обучены на огромных объемах данных. Подробнее о технологии можно прочитать в книге "Искусственный интеллект. Анализ, тренды, мировой опыт" https://digitalatom.ru/book-ai), таких как ChatGPT для интерпретации человеческих команд роботам.
Идея состоит в том, что LLM найдет применение не только для виртуальных приложений (которые мы все наблюдали в виде различных популярных сервисов на базе ChatGPT в 2023 г.), но и для создания физически воплощенных умных роботов, обогащенных новыми технологиями на базе LLM (см. рис. 15.1).
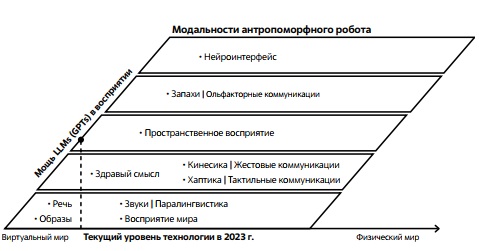
Рис. 15.1. Рост возможностей применения LLMs не только для вир- туальных приложений, но и для создания физически воплощенных роботов.
Источник: "Источники использованной литературы"
Ожидается, что генеративные модели, особенно большие языковые модели, которые способны "понимать" и генерировать текстовую и речевую информацию на естественном языке, откроют новые возможности во взаимодействии человека с роботами. Эти модели позволят роботам интерпретировать неявные команды, выраженные устно или письменно, для ввода данных, генерации инструкций и программирования на естественном языке. Более того, они упростят формирование сложных задач для различных типов роботов, облегчат коммуникацию между ними и улучшат процесс обучения роботов необходимым навыкам.
Для разработки стратегий решения задач для таких роботов уже не требуются строго формализованные команды оператора в рамках ограниченного набора действий. Теперь роботы могут самостоятельно оценивать промежуточные этапы и необходимые действия для удовлетворения желаний человека. По сути, они выполняют упрощенную версию "размышления", что открывает новые горизонты для развития их стратегических возможностей.
Все это обещает сделать интерфейс взаимодействия с роботами более естественным и значительно более функциональным. Согласно данным таблицы 15.1, технология оценивается как находящаяся на вершине пика завышенных ожиданий. Это может быть вызвано сложностью прогнозирования реальных возможностей использования больших языковых моделей (LLM) для управления роботами. Тем не менее уже сегодня достижения, продемонстрированные компаниями Tesla и RT-2, позволяют надеяться на выдающиеся результаты, которые продемонстрируют подобные роботы в области сложной манипуляции различными объектами.