Роботы в атомной промышленности
В данном курсе будет логично рассказать о конкретных проектах отраслевого применения робототехники. Эта тема будет раскрыта на примере атомной отрасли, в которой работают авторы курса и к которой, соответственно, относятся их профессиональные интересы.
Атомную промышленность можно отнести к области зарождения экстремальной робототехники.
Действительно, необходимость эксплуатации горячих камер на ранних этапах развития ядерной промышленности сыграла важную роль в становлении технологии дистанционного управления с помощью манипуляторов, которые впоследствии трансформировались в телеробототехнику.
Без роботов многие операции в атомной отрасли, в силу повышенной опасности радиоактивного заражения, было бы невозможно реализовать, не подвергая человека избыточному риску.
Однако, несмотря на использование роботизированных комплексов в целом ряде опасных операций на ядерных объектах, несмотря на множество научных разработок по применению роботов в отрасли, атомная промышленность - далеко не лидер по их массовому применению.
Особые требования к безопасности предсказуемо привели к осторожности при внедрении в ядерной отрасли новых технологий, включая робототехнику и особенно автономных роботов.
Некоторые решения, апробированные в других отраслях, находят тем не менее применение в атомной индустрии. При этом напрямую использовать доступные на рынке коммерческие образцы роботов удается далеко не всегда.
К роботам в атомной промышленности предъявляются особые требования, которым не удовлетворяют коммерческие аппараты (устойчивость к радиационному воздействию, необходимость удаленного обслуживания, ограничения на время развертывания и временные задержки при управлении).
Вредные воздействия радиации и других опасных факторов влияют не только на человека, но и на элементную базу машины. Высокие требования к надежности, управляемости и безопасности накладывают существенные ограничения на внедрение робототехнических решений в атомной промышленности. Сложность решения специфических задач стандартным оборудованием требует его модификации, что иногда упирается в экономические рамки.
Указанные требования ограничивают использование общепромышленного коммерческого продукта и обычно требуют его модификации. Модификация обычно включает в себя перемещение чувствительной электроники из зон радиационного воздействия или ее экранирование, защиту от радиоактивной пыли и т. п.
Важным требованием к роботам, применяемым в агрессивной среде, является обеспечение возможности безопасного восстановления оборудования в процессе его ремонта.
Это отдельная непростая задача, поскольку доступ человека в рабочую зону для проведения технического обслуживания в случае высокого уровня радиации ограничен.
Решение, применяемое в отрасли, должно обеспечивать минимальную вероятность выхода из строя, а ресурс должен быть возможно более высоким. Очень часто экономически более выгодно отказаться от ремонта устройства и утилизировать его с заменой на новое, чем пытаться его дезактивировать и ремонтировать.
Условия применения новых технологий в ответственных производствах, с одной стороны, требуют применения только проверенных временем решений, а с другой стороны - именно требования повышенной безопасности и эффективности ядерных объектов, более эффективной защиты людей, работающих в радиоактивной среде, стимулируют внедрение робототехники.
Поэтому, несмотря на все специфические трудности и риски, спектр робототехнических решений, используемых в атомной отрасли, постепенно расширяется. И хотя человек-оператор в большинстве отраслевых решений все еще находится в контуре управления, возможности роботизированных подсистем в плане их автономности постоянно увеличиваются.
На рынке существуют десятки компаний, предлагающих роботизированные решения для атомной отрасли, включая такие фирмы как Framatome, Qualter Hall, RAIN Hub, Kurion (Veolia), Northrop Grumman, Forth Engineering, Cyberia, BAE Systems, KUKA AG, Boston Dynamics. Большую работу в данном направлении производят различные под- разделения и партнеры Госкорпорации "Росатом". О некоторых из этих решений пойдет разговор в следующем разделе.
Основные направления применения робототехники в атомной промышленности
Оценки рынка робототехники в атомной отрасли от отчета к отчету разнятся очень сильно. Разброс оценок зависит от того, учитываются ли в рынке затраты на научно-исследовательские и опытно-конструкторские работы, связанные с индивидуальными нишевыми проектами, и причисляются ли к роботам роботизированные удаленно управляемые машины или нет.
Наиболее адекватно описанной ранее таксономии, на наш взгляд, отвечают данные отчета Global Insights (см. рис. 10.1), согласно кото- рому в 2022 г. рынок роботов в атомной промышленности составил около 1,4 млрд долл. Эти цифры не противоречат средним глобальным оценкам рынка робототехники, приведенным на рис. 9.5. Отчет Global Insights представляет интерес не только своими оценками размера рынка робототехники в области атомной отрасли, но и представлениями о структуре данного рынка.
Согласно Global Insights, наибольшая часть рынка приходится на автоматизацию обращения с ядерными отходами и на вывод из эксплуатации ядерных объектов (рис. 10.1). Качественно похожую картину структуры данного рынка приводят и другие авторы, отмечая, что использование робототехники в атомной промышленности сосредоточено на выполнении опасных работ в случае аварий, демонтаже ядерных объектов и на обращении с радиоактивными материалами в ядерно-топливной промышленности, а также в исследовательских целях.
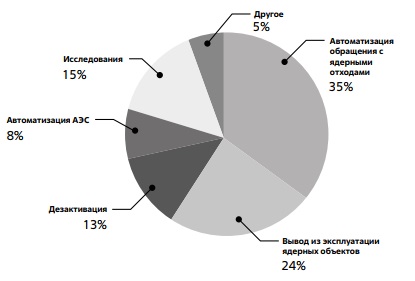
Рис. 10.1. Структура рынка роботов, применяемых в атомной промышленности. Общий объем 1,4 млрд долл. в 2022 г.
Источник: Global Insights [ "Источники использованной литературы" ]
Согласно данным Global Insights (рис. 10.1), примерно половину указанного рынка занимали наземные роботы, около 35% - решения на базе БПЛА, 13% приходилось на водных роботов и незначительная доля на гуманоидных.
Интересно отметить, что весьма большой процент авторы рис. 10.1 отнесли к проектам на базе БПЛА. Беспилотники начинают заменять человека во многих видах инспекции. Визуальный и тепловой осмотр оборудования может быть выполнен быстро, точно и с минимальными затратами. Дроны эффективно проводят мониторинг уровня радиации вокруг ядерных объектов, осуществляют функции мониторинга территории с точки зрения возможности физического вторжения на охраняемую площадку. Кроме того, выход из строя одиночного БПЛА вследствие радиации несет потенциально меньшие убытки, чем в случае потери специально разработанного сервисного робота. Более подробную классификацию предлагают авторы отчета Energiforsk (рис. 10.2), выделяя шесть базовых направлений применения робототехники в атомной энергетике, которые мы рассмотрим более подробно.

Источник: По материалам Energiforsk [ "Источники использованной литературы" ]
Начнем с такого важного для атомной отрасли направления как безопасность.
Безопасность
В области безопасности особое внимание обратим на два направления: первое - это защита при авариях и второе - проникновение на охраняемую территорию.
Направлению по созданию специализированных роботов для ликвидации последствий аварий на атомных объектах следует уделить более пристальное внимание, поскольку оно в существенной мере отражает историю развития специализированной робототехники в атомной отрасли.
Роботы для ликвидации аварии на АЭС и проведения аварийно-спасательных работ
Первые роботы для ликвидации аварий появились после событий 1979 года на американской АЭС Три-Майл-Айленд (Three Mile Island). В ходе этой аварии произошло расплавление части активной зоны реактора, помещения АЭС подверглись значительному радиоактивному загрязнению, однако последствия для окружающей среды оказались несущественными. Происшествие на АЭС стимулировало создание нового класса машин, которые требуются для реагирования на события подобного рода.
Для ликвидации последствий инцидента специалисты из Университета Карнегиеллон разработали несколько роботов удаленного управления, которые были оснащены камерами, фонарями, детекторами радиации, пылесосами, совками, скребками, бурами и распылительными форсунками высокого давления. Управляемые машины осматривали исследуемый участок, передавали информацию и брали пробы для измерения уровня радиации в стенах помещений АЭС. Авария повлияла на уровень внимания к безопасности в атом- ной отрасли в целом, способствовала созданию Института по эксплуатации атомных электростанций в США (Institute of Nuclear Power Operations, INPO) и Международной всемирной ассоциации операторов атомных электростанций (World Association of Nuclear Operators, WANO).
В 1986 г. произошла авария на Чернобыльской АЭС.
Были применены несколько вариантов дистанционно управляемых роботов для ликвидации последствий аварии. Высокоэффективные решения были представлены МВТУ им Н.Э. Баумана (МОБОТ ЧХВ МОБОТ ЧХВ 21"Мобильный робот, Чернобыль, химические войска" - компактная гусеничная машина весом около полтонны, оснащенная фронтальным погрузчиком с бульдозерным ковшом, отбойным молотком, манипулятором с грейфером, телекамерами, дозиметрическими приборами ) и ленинградским ВНИИТрансмаш (робот СТР). Под руководством ЦНИИ РТК было разработано несколько типов роботизированных систем различного назначения. Упомянем лишь некоторые аппараты. Первый колесный робот-разведчик РР-1 в течение суток работал в зоне, где уровень радиации достигал 18 000 Р/ч. Аппарат был оснащен телевизионной камерой и измерителем мощности дозы излучения.
Гусеничный робот-разведчик РР-Г1 был создан для обследования мест, недоступных для колесных технических средств, включая лестницы. Еще один аппарат - ТР-А1 (робот с навесным рабочим инструментом в виде бульдозерного ножа и ковша) - применялся для сваливания в провал 4-го энергоблока радиоактивного мусора и в общей сложности проработал более 200 часов.
Радиоуправляемый тяжелый робот ТР-Б1 с автономным энергопитанием от бензинового электроагрегата (время автономной работы составляло 8 часов) использовался для очистки территории станции. Робот мог комплектоваться манипулятором с дисковой пилой или навесным рабочим инструментом.
На ликвидации аварии применялась и советская, и зарубежная техника. Для разбора завалов и земляных работ в районе станции применялись машины разграждения 2Инженерный танк, армейская боевая машина, предназначенная для прокладки колонного пути на местности, проделывания проходов в завалах, для выкапывания и засыпки котлованов и тяжелые бульдозеры (советский "Клин-1", финский Tamrock, японский Kamatsu D-155, немецкий Liebherr PR751 и др.).
Для расчистки, снятия и удаления радиоактивно загрязненного слоя на станции применялись российские (СТР-1, МОБОТ, ТР-А, ТР-Б, ТР-Г, ДДК-Р1) и немецкие машины (MF2, и MF3). Для дезактивации и сбора радиоактивных фрагментов - аппараты "Урал", "Крот", РПБ, "Белоярец" и другие. [191].
В 2011 г. в результате сильнейшего землетрясения и последовавшего за ним цунами произошла авария на АЭС "Фукусима-1". Перед Японией встала задача ликвидации последствий. Требовалось разобрать образовавшиеся завалы, удалить элементы реактора и ядерного топлива. Сразу после аварии в основном использовались роботы военного назначения и беспилотные строительные машины, но для успешного выполнения работ по выводу из эксплуатации потребовалась разработка специализированного оборудования, которое бы учитывало условия его использования в конкретной аварии.
Со времени аварии было разработано несколько десятков машин для работы на АЭС "Фукусима-1", которая стала своеобразным полигоном для тестирования экстремальной робототехники разного профиля. Процесс ликвидации аварии продолжается, так же как и работы над новыми моделями роботов. Ученые полагают, что вывод из эксплуатации АЭС "Фукусима-1" займет 30-40 лет.
Для ликвидации последствий аварии использовалось множество специализированных типов роботов - наземных и подводных.
В одной из классификаций роботов для работы на месте аварии авторы из Института проблем демонтажа ядерных объектов (IRID) предлагают выделять три типа роботов: роботы для извлечения мусора и преодоления препятствий, роботы для исследований, или разведывательные роботы, и роботы технического обслуживания. Примерное положение каждой из указанных групп машин в системе координат "размер" - "устойчивость к уровню радиации" показана на рис. 10.3.
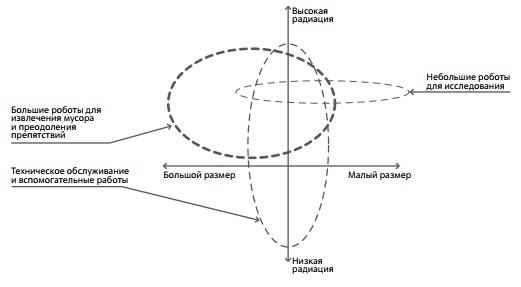
Источник: [ "Источники использованной литературы" ]
Перечисленные типы роботов могут иметь "ручное", полуавтоматическое и автоматическое управление.
Для извлечения топливного мусора требуются большие и тяжелые роботы, способные разрезать и преодолевать препятствия. Роботы для исследований должны быть минимальных размеров, чтобы пройти через имеющиеся отверстия.
Задачи технического обслуживания могут быть различны и требовать разных рабочих инструментов и датчиков, работающих при разном радиационном воздействии. Такие роботы обычно рассчитаны на более длительный срок службы, чем разведывательные и уборочные.
В подходе, используемом в работе (рис. 10.4, 10.5), анализируя роботов для ликвидации аварий на АЭС, авторы не рассматривают техобслуживание как отдельный пункт и предлагают выделять две основные группы роботов - роботы для исследований и роботы для дезактивации, а также дополнительный тип, обладающий чертами и первого, и второго. Перечисленные выше машины могут иметь разные механизмы передвижения (см. рис. 10.4).