Эволюция роботов
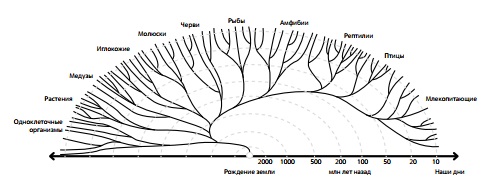
Мы отметили многообразие современных роботов. Не будет большим преувеличением сказать, что своей сложностью схема эволюции данных устройств напоминает картину эволюции животного мира (рис. 2.1), так как в этих процессах можно найти много общего.
Рассмотрим сходные стороны этой эволюции и прокомментируем различия.
Роботы, как и живые существа, занимают все новые ниши в макро и микромире на земле, в воде, в воздухе.
В животном мире выживают те организмы, которые имеют возможность адаптироваться к окружающим условиям. Роботы в своем развитии тоже приобретают все больше механизмов адаптации к изменяющейся среде.
Живые организмы изменяются под влиянием окружающих их условий обитания. В известной мере так же эволюционируют и роботы - машины, которые лучше справляются с поставленными задачами, продолжают существовать и развиваться, в то время как менее эффективные модели замещаются на более совершенные 1Конечно, аналогия с эволюцией в живом мире ограничена в плане движущей силы этого процесса. Говоря о том, что роботы развиваются, мы имеем в виду процесс творческого освоения мира человеком, который создает себе все новые орудия труда.
Конвергенция и дивергенция, подробно описанные в развитии живых существ, проявляются также в развитии робототехники. Как и в животном мире, в процессе эволюции роботов проявляется движение в сторону унификации и стандартизации (группы роботов становятся сходны в своем конструкционном и функциональном исполнении), происходит слияние все большего числа технологий в рамках все более умного устройства (конвергенция).
Одновременно происходит процесс дивергенции (расхождения) - группы роботов развиваются в разные направления и приобретают уникальные свойства, что приводит к возникновению новых форм и типов роботов, которые осваивают все новые ниши. Они научились передвигаться в разных средах (ходить, ползать, плавать, летать), а следом появились модели роботов, которые освоили передвижение во всех средах одновременно (рис. 2.2), а также получили уникальную функциональность для использования в разных отраслях промышленности, для предоставления профессиональных и домашних сервисов самого разного профиля.
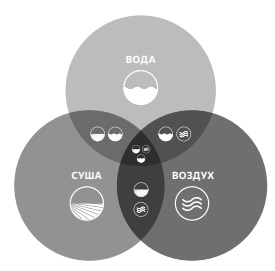
Рис. 2.2. Разработаны роботы, которые функционируют в разных средах и в том числе в нескольких средах попеременно
Источник: [ "Источники использованной литературы" ]
В животном мире эволюционирующие организмы наращивают интеллектуальные способности2Под интеллектом у животных понимается совокупность психических функций, к которым относятся мышление, способность к обучению и коммуникации, которые не могут быть объяснены инстинктами или условными рефлексами, чтобы приспособиться к изменяющимся условиям окружающей среды. Роботы также получают развитие с ростом доступного вычислительного оборудования и новых ИИ-моделей, тем самым приобретая большую автономность и широту функциональности. Например, в плане навигации в непредсказуемой среде, ориентации в пространстве, в общении с людьми на естественном языке.
Как видно из рис. 2.1, эволюция живых организмов шла по сложной траектории от простейших до млекопитающих вплоть до появления человека. При этом робототехника началась с макромасштабов (с размеров, соизмеримых с человеком) и с использования тех конструкционных материалов, которые были на тот период доступны для изготовления роботов (металлы, твердые пластики). Далее робототехника развивалась в разных направлениях. С одной стороны, в область усложнения макромашин, с другой - в область создания миниатюрных машин с упрощенной архитектурой (микро- и даже наномасштаба), а также в сторону все большего многообразия используемых материалов (в том числе мягких).
Этапы эволюции
Описать процесс эволюции роботов непросто, так как он включает в себя множество ответвлений. Мы начнем с самой простой абстракции - с попытки представить данную эволюцию в виде линейного процесса, а точнее, одной ленты времени, и выделить ключевые технологические этапы в развитии роботов разного назначения. Этот подход наиболее удобен для восприятия, хоть и существенно упрощает картину мира эволюции роботов.
Существуют разные периодизации этапов развития робототехники. Одни авторы выделяют четыре поколения роботов (рис. 2.3), другие пять ( рис. 2.4).
Авторы рис. 2.3 связывают поколения эволюции роботов с четырьмя технологическими новациями, которые на рисунке представляются как движущие силы соответствующих этапов - это "промышленная автоматизация", "коллаборативные роботы 3 Более подробное описание коллаборативных роботов будет приведено далее в первой лекции", "мобильные роботы" и "умные роботы" (роботы с элементами ИИ). Последние две новации относятся к периоду перехода к четвертой промышленной революции, которая позволяет реализовать новые способы производства, совершенствования и распространения продукции на основе внедрения новых технологий, включая Интернет вещей, облачные вычисления, аналитику на основе больших данных, искусственный интеллект.
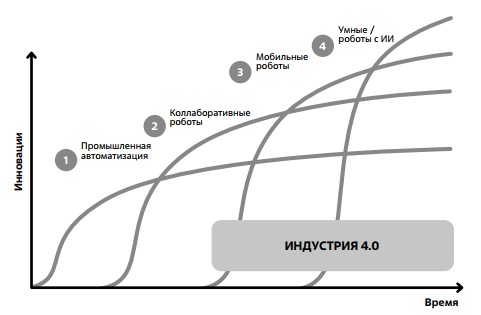
Источник: [ "Источники использованной литературы" ]
Авторы статьи, упомянутой на рис 2.4, предлагают пять периодов в эволюции и, соответственно, пять поколений роботов.
Мы будем придерживаться периодизации, предложенной на рис. 2.4, так как на нее ссылаются многие аналитики.
Рис. 2.4 показывает ключевые этапы, динамику роста числа роботов разных типов, а также динамику изменения интереса к робототехнике со стороны общества. Период 1950-1967 годов соответствует росту внимания к этим машинам в связи с применением первых роботов-манипуляторов в промышленном производстве. На втором этапе наблюдается всплеск интереса, связанный с использованием сенсоров в роботах, провал на третьем этапе связан с тем, что промышленные роботы развивались без особых революционных новаций, а сервисные были еще мало представлены сообществу. Четвертый и пятый этапы связаны с развитием самых разных роботов, с их использованием во все большем числе индустрий (а также и в домашнем применении), с ростом осведомленности о применениях роботов и экономическом эффекте от их внедрения.
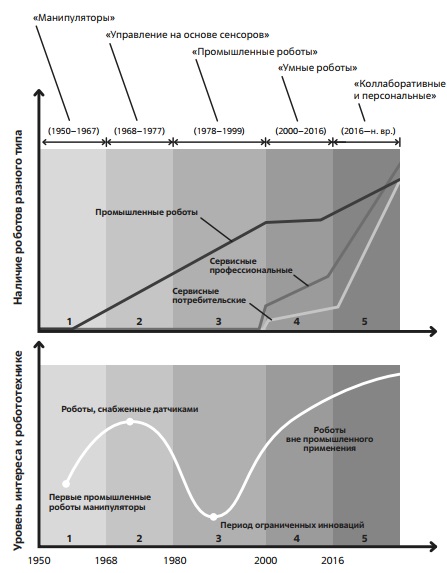
Рис. 2.4. Ключевые периоды развития роботов разного типа (верх) и динамика уровня интереса общества к робототехнике на основе анализа публикаций в СМИ (низ).
Источник: [ "Источники использованной литературы" ]
Как видно из рисунка, период раннего развития робототехники условно начинается с 1950 г., при этом, говоря о зарождении роботов, следует упомянуть несколько изобретений и научных разработок более раннего времени.
Например, в самом конце 19 века была разработана "торпедная лодка" Николы Тесла, которую изобретатель называл "телеавтома- том". Прототип катера управлялся дистанционно по радио, модель приводилась в движение электродвигателем. Полезной нагрузкой должна была быть взрывчатка. Тесла получил патент под названием "Методы контроля и управляющие устройства для радиоуправляемых плавательных средств и колесных экипажей".
Отдельные проекты в области беспилотных летательных аппаратов и управляемого ракетного оружия также возникали до 1950-х и были ускорены военным временем.