От одиночных роботов к мультиагентным системам
Мы уже отметили некий тренд развития робототехники от изолированных роботов к кооперативным и коллаборативным системам, в основном концентрируясь на кооперации между людьми и роботами. Мы также затронули тему сотрудничества между роботами, обсуждая сетевую робототехнику. В данном разделе поговорим о классификации мультиагентных робототехнических систем и чуть более подробно остановимся на таком понятии как "роевая робототехни- ка".
Но в начале перечислим, в чем преимущества мультиагентных систем (рис. 6.1).

Источник: [ "Источники использованной литературы" ]
Подобно тому, как коллектив рабочих может выполнить задачу более эффективно, чем один специалист, группы роботов могут выполнять задачу быстрее и эффективнее за счет декомпозиции и распараллеливания ее выполнения.
Группа может выполнить задачу, которая не под силу одному роботу, за счет выполнения действий в разных местах в одно и то же время (например, одновременное открывание дверей в доме). Группа машин может обладать более широким диапазоном чувствительности (распределенное зондирование). В случае использования однотипных роботов группа может обладать повышенной отказоустойчивостью за счет замены робота, вышедшего из строя.
оворя о классификации мультироботных систем, рассмотрим рис. 6.2.

Источник: По материалам [ "Источники использованной литературы" ]
Централизованные и децентрализованные системы. Мультиагентные системы с координированным управлением характеризуются обменом информацией для достижения общей цели. В таких системах используются механизмы связи, позволяющие роботам обмениваться данными, распределять задачи и совместно планировать свои действия. Для эффективного управления взаимодействием между роботами может использоваться централизованное или децентрализованное управление.
Преимущества стратегии централизованного (глобального) управления роботами с единой станции выражены прежде всего в простоте ее физической и программной реализации. Задача решается на одном мощном компьютере, и далее команды рассылаются на всех роботов, позволяя использовать более дешевые сенсоры и контроллеры на каждом агенте. Ее недостатками является низкая надежность, когда при потере сигнала от управляющей станции роботы начинают ошибаться или прекращают работу, а также временные задержки при передаче команд управления от верхнего уровня к каждому роботу.
Преимуществами децентрализованного управления роботами являются, наоборот, высокая надежность роя и более гибкая эффективность всей системы на локальных задачах. В то же время она предъявляет повышенные требования к сложности каждого робота и надежности местных каналов связи между ними.
В децентрализованных системах каждый робот работает автономно, принимая решения на основе локальных наблюдений и целей без учета действий и состояний других роботов. Отсутствие координации может привести к непреднамеренным взаимодействиям или конфликтам.
Гетеро- и гомогенные. По составу мультиагентные системы можно классифицировать на гетерогенные и гомогенные (неоднородные и однородные). Все роботы в однородной мультиагентной системе базируются на одном аппаратном и программном обеспечении. В гетерогенных - на разном.
Гетерогенность может проявляться в разной степени: может быть вариант, когда только лидер отличается от других членов группы, а может быть вариант, когда в группе много разных типов роботов. Гетерогенность также может относиться как к функциональности роботов (разные беспилотники несут на себе различное оборудование), так и к самой морфологической структуре роботов в группе (гетерогенный рой шагающих и летающих роботов). Гетерогенные мультиагентные системы лучше адаптируется к ситуациям, возникающим в реальной динамической среде, однако чем больше степень гетерогенности, тем сложнее механизм координации. В однородной системе роботы выполняют задачи с одинаковой эффективностью, и при отказе любого робота он может быть легко компенсирован.
Кооперативные и конкурентные. Кооперативное поведение подразумевает взаимодействие роботов для оптимального выполнения задачи, например кооперативное сопровождение цели. Конкурентное поведение подразумевает, что несколько роботов с разными функциями полезности соревнуются между собой.
Коммуникативные и некоммуникативные. Под коммуникацией понимается любой способ, с помощью которого роботы могут сообщать или воспринимать какую-либо информацию друг о друге. В зависимости от того, как роботы воспринимают информацию или обмениваются ею, предлагается два типа коммуникации: прямая (агенты коммуницируют явно) и косвенная (агенты коммуницируют неявно). Первая для обмена данными использует специальное устройство, во второй роботы получают информацию от других участников группы (косвенно) через окружающую среду.
Пассивные и активные агенты. Агенты мультиагентной системы называются активными, если они могут получать данные о внешней среде и реагировать на ее изменения. Агенты, не обладающие этой способностью, называются пассивными.
Роевые роботы
Роевые роботы являются частью мультиагентных систем, и как группа они обладают некоторыми дополнительными характеристиками, определяющими их групповое управление и поведение. Рои - это особый тип мультиагентных систем. Рой представляет собой группу значительного количества роботов, которые работают вместе и обмениваются информацией для достижения определенной цели [ "Источники использованной литературы" ]. Роботы могут быть гетерогенные (разнородные, например мобильные роботы, работающие в тандеме с БПЛА) или однородные (например, рой дронов)1Более подробно о роевых роботах речь пойдет далее в этой лекции .
В мультиагентных системах возможны сценарии, в рамках которых отдельные роботы способны выполнить какую-то часть задачи. Возможно, что без участия всех агентов конечная цель не может быть достигнута полностью, но отдельные ее части все же могут быть выполнены. Мультиагентная система может состоять из роботов, каждый из которых специализируется на выполнении определенной задачи. Роботы могут взаимодействовать между собой для достижения конечной цели, но и по отдельности способны выполнять некоторые действия. Такая система может условно сравниваться с сообществом людей. В разных задачах использование коллективных усилий играет разную роль, при этом задачи могут быть выполнены и одним человеком, и коллективом (во втором случае быстрее, более эффективно).
В случае роевого поведения речь идет не просто о взаимодействии нескольких роботов, а о множестве роботов, каждый из которых обладает ограниченным интеллектом. Так что отдельный агент не может решить часть роевой задачи. Только совокупность упомянутых действий отдельных роботов приводит к появлению новых возможностей системы и реализации сложных задач, выполняемых роем [ "Источники использованной литературы" ].
Роевые системы используют роботов ограниченного интеллекта, которые не имеют возможности осознания задач, которые выполняются на уровне роя.
Раньше мы отмечали, что эволюция идет по пути усложнения и повышения интеллекта отдельных роботов, однако на примере создания роевой робототехники можно отметить, что здесь речь идет o создании мультироботных систем на уровне примитивного сознания отдельных членов большого сообщества. В такой системе коллективное поведение роботов является результатом локальных взаимодействий между роботами и между роботами и окружающей средой, в которой они действуют.
Технология была изначально вдохновлена поведением коллективных насекомых, где имеет место роевое поведение (пчел, муравьев и т. п.). Однако с совершенствованием отдельных роботов и развитием децентрализованного роевого управления подобные системы возможно сравнить и с более "интеллектуальными" коллективами животных.
Одно из объяснений организации деятельности социальных насекомых было дано французским биологом Пьером-Полем Грассом, который ввел понятие стигмергии для объяснения своих наблюдений за поведением термитов при строительстве термитных курганов. Выяснилось, что взаимодействие насекомых может быть прямым (зрительный контакт, химическое взаимодействие) или косвенным (одна особь изменяет окружающую среду, а другая реагирует соответствующим образом на новые условия).
Термин происходит от греческих слов "stigma" - знак и "ergon" - работа (под руководством стимулов). Стигмергия, таким образом, представляет собой форму непрямой коммуникации, при которой каждый индивидуум воздействует на окружающую среду, а другие индивидуумы, обнаружившие некоторые изменения в среде, реагируют на стимул [ "Источники использованной литературы" ].
Рои роботов находят все более широкое применение и могут использоваться, например, для поиска и спасения, исследования неизвестных территорий, а также в военных целях.
Следует отметить, что роевая робототехника связана с ранее рассмотренными технологиями облачных вычислений, интернетом вещей, периферийными вычислениями.
Интеллектуальные самореконфигурируемые роевые гетерогенные системы можно представить на пересечении технологий робототехники, мультиагентных систем (MAS Multi-agent system) и облачно-периферийной робототехники (рис. 6.3).
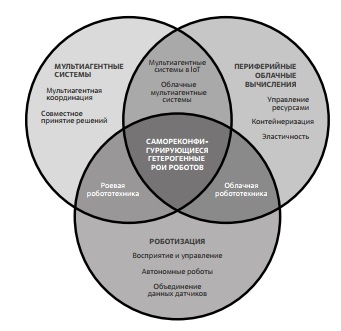
Рис. 6.3. Роевые технологии как пересечение робототехники, облачных технологий и технологий многоагентных систем
Источник: [ "Источники использованной литературы" ]
Модульная робототехника и многоагентные системы
Модульная робототехника фокусируется на проектировании и создании роботов, состоящих из взаимозаменяемых и реконфигурируемых модулей или компонентов. Эти модули можно комбинировать, объединять или разъединять для создания различных конфигураций или форм роботов, что обеспечивает гибкость и адаптивность в различных условиях или задачах.
Модульные роботы обладают высокой адаптивностью и могут быть переконфигурированы для удовлетворения различных потребностей, что актуально в условиях меняющейся окружающей среды (например, переход из воды на сушу).
Каждый модуль может иметь собственный процессор, память и источник питания, или же они могут управляться центральным процессором или сетью процессоров.
Модули могут быть соединены друг с другом различными способами, например с помощью физических разъемов, магнитных или электрических контактов или даже с помощью беспроводной связи. В последнем случае идея модульной робототехники смыкается с идеями многоагентных систем и роевой робототехники. Оба подхода исследуют идею объединения нескольких относительно простых объектов (будь то роботы или модули) для достижения сложного и адаптивного поведения.
Наглядная иллюстрация возможности реконфигурации и изменения формы и назначения мультимодульного реконфигурируемого робота показаны на рис. 6.4.
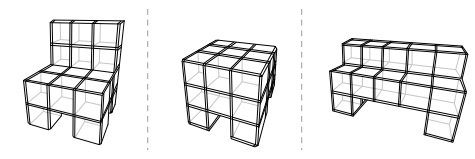
Рис. 6.4. Моделирование изменений конфигурации 19 кубов от стула к столу (через 22 маневра) и к дивану (через 40 маневров)
Источник: [ "Источники использованной литературы" ]
Если рой состоит из отдельных роботов, которые могут выполнять коллективные действия вместе, приобретая новое качество, то в модульном роботе отдельные модули могут быть перестроены, меняя функциональность и придавая новые возможности многомодульному роботу. Способность роботов к адаптации своей морфологии для решения определенных задач называют "морфогенезом" и, соответственно, говорят о морфогенетических роботах.
Самореконфигурируемость обеспечивает такие важные свойства роботов как многофункциональность, способность к развитию и живучесть ( рис. 6.5).
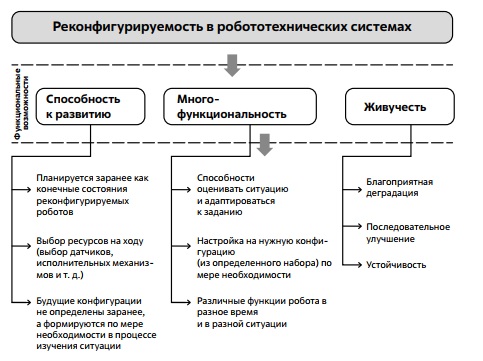
Рис. 6.5. Реконфигурируемость в робототехнике обеспечивает способность к развитию, многофункциональность и живучесть робота
Примечание: благоприятная деградация относится к постепенному контролируемому ухудшению.
Если в концепции модульных роботов четко не указывается, кто производит изменение конфигурации робота (например, это может быть человек), то в концепции "самореконфигурируемые роботы" подразумеваются роботы, которые могут самостоятельно изменять свою морфологию в соответствии с предписанными требованиями.