Совместное развитие сенсорики и робототехники
Продолжить рассказ о развитии роботов практически невозможно, не произведя экскурс в область используемых в робототехнике сенсоров.
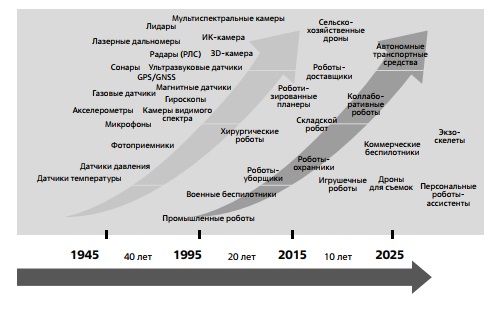
В самом общем плане сенсор (датчик) - это устройство, используемое для регистрации физической величины и преобразования измерения в электронный сигнал, который робот может интерпретировать и реагировать на него. Как мы уже отметили, управление системами робота невозможно без контроля их состояния - равно как и взаимодействие роботов с внешней средой невозможно без использования сенсоров, которые эту среду "ощущают". В этой связи эволюция сенсоров в существенной мере обуславливала появление у роботов новых возможностей (рис. 4.1).
Источник: [ "Источники использованной литературы" ]
Рис. 4.1 позволяет не только проследить последовательность в применении тех или иных сенсоров, но и эволюцию самих роботов. При этом следует отметить, что время появления тех или иных устройств на обсуждаемом рисунке достаточно условно - время изобретения датчиков, начало их применения в технике вообще и массовое использование в робототехнике может существенно отличаться. Например, гироскопы (системы, предназначенные для определения углового положения объектов в гравитационном поле), которые на графике соответствуют концу прошлого века, были изобретены еще в 1852 г. Впервые на практике гироскоп был применен в 1880-х годах для стабилизации курса торпеды. В середине XX века гироскопы получили использование в авиационной и судоходной навигации. В 1960-х годах они начали применяться в робототехнике, а начиная с 80-х годов применение гироскопов стало массовым по мере того, как эти приборы стали использовать в роботах манипуляторах и мобильных роботах.
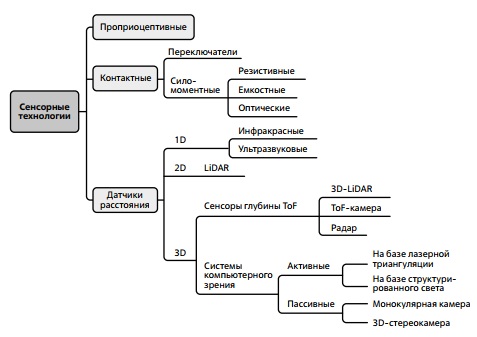
В робототехнике используется множество датчиков для измерения широкого набора параметров. Их классификация представлена на рис. 4.2.
Источник: [ "Источники использованной литературы" , "Источники использованной литературы" ]
В первую очередь датчики можно разделить на внутренние (проприоцептивные) и внешние (экстероцептивные). Первые производят измерения физических величин внутри робота (например, температуры внутри двигателя). Вторые получают информацию из окружающей среды (например, измеряют расстояния до близлежащих объектов). В некоторых источниках, как например на рис. 4.2, эту категорию именуют "датчики расстояния".
Выделяют также такой класс как "контактные датчики" - датчики, которые могут сообщать, касается ли робот элементов окружающей среды, в каких местах происходит касание, а также позволяют измерить силу оказываемого давления. В некоторых источниках контактные датчики относят к экстероцептивным, а в других (как на рис. 4.2) выделяют в отдельную категорию. Рассмотрим обозначенные категории более подробно.
Проприоцептивные датчики
Проприоцептивные датчики также называют датчиками внутреннего состояния1Термин "проприоцепция" используется в медицине как способность животных и человека определять положение и движение своего тела. Аналогично информация, получаемая роботами от проприоцептивных датчиков, позволяет "осознавать" машине свои движения для более эффективного взаимодействия с окружающей средой - это встроенные датчики для мониторинга различных внутренних параметров (температура, напряжение, ток, давление, ускорение и др.) для обеспечения обратной связи с системой управления робота.
Мы уже упоминали датчики этого типа, когда говорили о сенсорах, которые используются для контроля положения и скорости различных сочленений робота. Для контроля положения руки робота обычно используются потенциометры и оптические энкодеры. Поворотный потенциометр используется для измерения вращения вала (измеряет аналоговое напряжение, соответствующее углу поворота). Оптический энкодер (датчик перемещения, основанный на светодиоде и приемном инфракрасном элементе, между которыми вращается диск, с прозрачными окнами) позволяет определить угловое положение, направление, скорость и частоту вращения.
Для контроля скорости движения манипулятора используются тахометры различных типов. Датчики внутреннего состояния позволяют роботу измерять различные параметры состояния робота, помогая выполнять точные движения, избегая нанесения ущерба детали.
Датчики внутреннего состояния позволяют обнаруживать причины и предотвращать поломки самого робота. Например, датчик может обнаружить перегрев двигателя и дать сигнал системе снизить нагрузку, чтобы предотвратить повреждение.
Контактные датчики
Как отмечено на рис. 4.2, контактные сенсоры делятся на датчики переключения и датчики силы. И первые, и вторые широко используются в робототехнике для измерения и мониторинга физических взаимодействий и сил в режиме реального времени.
Контактные сенсоры переключения обнаруживают физический контакт или присутствие объекта. Как правило, это бинарные датчики, которые выдают сигнал, указывающий на наличие или отсутствие контакта. Датчики переключения часто используются для определения положения механических компонентов, обнаружения объектов в захвате, а также для определения границ рабочего пространства робота. Датчики силы генерируют выходной сигнал, указывающий на величину приложенной силы. Они могут использоваться для измерения силы захвата, обратной связи по силе в роботизированных системах, например при захвате хрупких объектов. Робот, захватывающий предмет, должен прикладывать усилие, достаточное для его надежного удержания без повреждения предмета или самого захвата. Постоянное применение чрезмерного усилия приводит к преждевременному износу элементов захвата.
Существует ряд технологий, на основе которых создаются датчики силы, включая резистивные, емкостные и оптические.
Резистивные (тензометрические) основаны на изменении электрического сопротивления. При воздействии силы на датчик сопротивление меняется и может быть измерено и соотнесено с величиной силы. Резистивные датчики - это экономичное решение, применимое для широкого спектра приложений по измерению сил в робототехнике.
Емкостные датчики используют изменение емкости для измерения силы. Конструктивно они выполняются в виде конденсатора, состоящего из двух параллельных пластин с зазором между ними. Емкость конденсатора обратно пропорциональна расстоянию между пластинами. При приложении силы расстояние между чувствительными элементами меняется, изменяя емкость. Емкостные датчики силы обладают высокой точностью и чувствительностью.
Оптические датчики силы обычно используют волоконно-оптический кабель. Наблюдая за отражением света при прохождении его через кабель, можно определить степень деформации и использовать ее для определения приложенной силы. Оптические датчики силы хорошо работают в средах с высоким уровнем электромагнитных помех, при экстремальных температурах и в других опасных условиях.
Датчики расстояния
Датчики расстояния используются для измерения расстояния между роботом и другими объектами. Для этого могут использоваться ультразвуковые, лазерные, радарные и оптические датчики.
С помощью датчиков разной конструкции можно измерить расстояния до точки (1D), а также получить данные об окружении на плоскости (2D) и в пространстве (3D) об окружающих объектах.
Например, в мобильном роботе датчики расстояния используются для обнаружения препятствий, распознавания объектов и навигации в окружающей среде.
Отмеченные на рис. 4.2 ультразвуковые и инфракрасные датчики широко используются в робототехнике для бесконтактного измерения расстояния в навигационных системах в ближней зоне (обход препятствий и обеспечение безопасности).
Ультразвуковой датчик расстояния измеряет близость объекта путем излучения высокочастотных звуковых волн и регистрации времени, прошедшего до отражения сигнала. Для препятствий из различных типов материалов производительность датчика может быть различной.
Инфракрасный датчик работает на основе обнаружения света с длиной волны в диапазоне 760 нм (ИК-спектр), который излучается ИК-светодиодом (LED2LED ( Light-emitting diode) - светодиод ).
Расстояние может быть измерено по изменению интенсивности принятого света. На показания ИК-датчика может влиять цвет материала препятствия.
На рис. 4.2 упомянут LiDAR - аббревиатура от Light Detection and Ranging "обнаружение и определение дальности с помощью света".
Лидар запускает в сторону цели короткий импульс лазерного излучения, который частично отражается от цели, возвращается обратно и воспринимается фотодиодом. Ток на фотодиоде пропорционален воздействующему свету. Таким образом, LiDAR - это система измерения расстояний путем излучения света (лазера) и замера времени возвращения отраженного света на приемник.
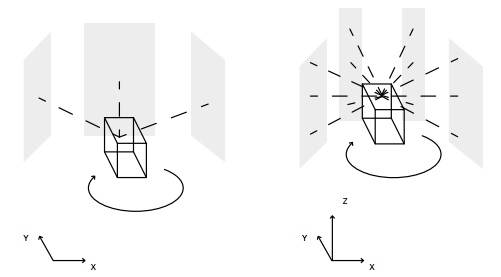
Различают 2D- и 3D-лидары. Если 2D-лидары могут измерять рас- стояние, отражая свет от одной поверхности, то 3D-лидары расширяют эту возможность, используя одновременно несколько лучей света для создания трехмерной картины местности (см. рис. 4.3).
Источник: [ "Источники использованной литературы" ]
2D-LiDAR использует один лазерный луч для обнаружения окружающих предметов в одной плоскости. В схеме, показанной на (рис. 4.3 (а)), устройство посылает импульсы света, совершая поворотное движение, что позволяет оценивать расстояние до окружающих целей в горизонтальной плоскости (оси X и Y).
3D-Lidar использует несколько лазерных лучей (от 16 до 128 в зависимости от модели) для одновременного измерения в нескольких плоскостях (рис. 4.3 (б)).