Совместное развитие сенсорики и робототехники
На примере наземных мобильных роботов можно показать, как непрерывное изменение мобильности приводит к трудностям классификации.
Часть авторов [ "Источники использованной литературы" ] отмечают, что под мобильными роботами в первую очередь подразумеваются автоматизированные управляемые транспортные средства (Automated Guided Robots AGV) и автономные мобильные роботы (AMR Automated Mobile Robots). При этом специалисты из IFR утверждают, что "AGV - это не робот, а роботизированное устройство, поскольку оно не обладает автономностью, позволяющей самостоятельно определять траекторию движения или перемещаться без внешнего управления" [ "Источники использованной литературы" ].
С другой стороны, можно сказать, что именно эволюция автоматизированных управляемых транспортных средств (AGV) привела к появлению AMR (автономных мобильных роботов, которые становятся все более интеллектуальными устройствами, способными автономно ориентироваться в сложной непредсказуемой среде).
Взглянем более подробно на эту эволюцию. С середины 1950-х годов прошлого века, когда появились первые AGV, система навигации этих машин прошла ряд этапов, включая навигацию по рельсам, по контрастной линии, по индукционному кабелю, по маякам и с помощью лазерной навигации (рис. 4.32).
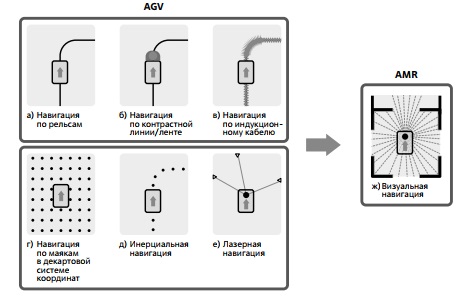
Поясним суть этапов, отмеченных на рисунке.
- Навигация по рельсам предполагает физическое управление AGV с помощью стационарной инфраструктуры (например, вмонтированных в пол рельсов). AGV обычно имеет механические устройства, которые взаимодействуют с инфраструктурой, обеспечивая следование по определенной траектории.
- Навигация по контрастной линии осуществляется на основе использования системы технического зрения для отслеживания меток (маркировки) на полу, которые направляют AGV по заданному пути.
- Навигация по индукционному кабелю основана на использовании электромагнитных полей. AGV движется по траектории, определяемой вмонтированными в пол проводами, создающими магнитное поле. AGV обнаруживает данные поля с помощью датчиков и движется по заданному маршруту.
- Навигация по маякам в Декартовой системе координат - это управление AGV с использованием декартовой системы координат, то есть AGV направляются по заданному пути с использованием координат x, y. Для этого могут использоваться различные средства, например маяки, размещенные в окружающей среде, которые AGV могут обнаружить и использовать в качестве опорных точек.
- Инерциальная навигация основана на использовании датчиков, таких как акселерометры и гироскопы, для измерения изменений ускорения и угловой скорости. Когда AGV находится в движении, инерционные датчики регистрируют ускорения и вращения, и путем непрерывного интегрирования этих измерений AGV может оценить свое положение и ориентацию относительно известной начальной точки. Этот метод часто используется в сочетании с другими техно- логиями управления.
- Лазерная навигация AGV осуществляется путем испускания лазерных лучей и измерения их отражения от поверхностей, объектов или отражателей в окружающей среде.
Если традиционные AGV могут следовать только по фиксированным траекториям и перемещаться в заранее определенные точки на направляющей траектории, то AMR могут перемещаться в любую доступную и свободную от столкновений точку в пределах заданной области и, как правило, используют машинное зрение для визуальной навигации (рис. 4.32 (ж)).
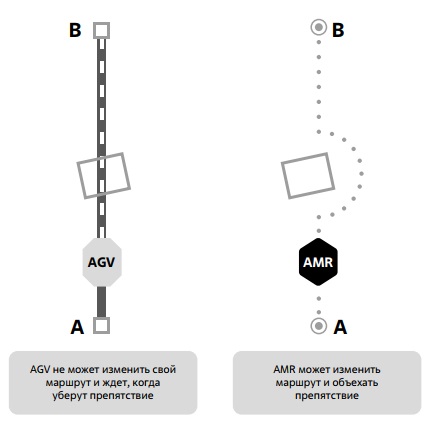
Небольшие изменения, связанные с расположением оборудования, обычно вызывают периоды бездействия AGV (рис. 4.33 (а)), что приводит к экономическим потерям в это время, тогда как AMR могут быстро адаптироваться к изменениям в рабочей среде.
По сути, AMR это беспилотное транспортное средство, оснащенное системами камер, лидаров и имеющее на борту мощную систему управления на основе компьютерного оборудования. При этом, обладая указанной автономностью, AMR при прочих равных характеристиках стоит намного дороже, чем AGV.
Автономность транспортных средств AMR подразумевает способность робота принимать решения в операционной среде согласно существующим правилам и ограничениям.
По сравнению с автоматизированной системой управляемых транспортных средств (AGV), в которой центральный блок принимает решения по планированию, маршрутизации и диспетчеризации для всех AGV, AMR могут общаться и вести обмен информацией независимо с другими ресурсами (машинами, наземными станциями, приложениями класса ERP) и таким образом децентрализовать процесс принятия решений. Децентрализованное принятие решений может предоставлять системе возможность динамически реагировать на изменения в состоянии системы и окружающей среды.
С одной стороны ( рис. 4.33), дает пример разграничения понятий AGV и AMR, с другой стороны, дальнейшая эволюция AGV привела к понятию "интеллектуальные AGV", и использование данного термина размывает границу между AGV и AMR. Наряду с термином AGV применяется также термин AGC (Automated Guided Carts - автоматизированные тележки) - более компактные версии AGV, предназначенные для перемещения небольших грузов, таких как коробки, поддоны и сборочные компоненты и т. п.
Трудности классификации роботов по степени автономности накладываются на сложности проведения границы между промышленными и сервисными роботами.
Автономные мобильные роботы (AMR) широко используются в промышленных условиях, при этом в рамках вышеописанной таксономии ISO/IFR они не всегда отвечают определению промышленного робота ( рис. 1.18) хотя бы потому, что у них не всегда есть элементы, обеспечивающие возможности манипулирования внешними объектами. Напомним, определение ISO/IFR четко постулирует, что промышленный робот - это манипулятор. Поэтому IFR классифицирует AMR как сервисных роботов. И если AMR оснащен манипулятором, статистика IFR учитывает манипуляторы отдельно, относя их к классу промышленных роботов, а мобильные платформы отдельно, относя их к сервисным роботам. Мы также отметили, что IFR считает, что AGV - это не робот, а роботизированное устройство, поскольку оно не обладает автономностью для определения собственного пути без внешнего руководства.
Напротив, согласно методике ANSI/RIA R 1508 (рис. 4.34), к промышленным роботам относятся не только автономные мобильные роботы, не имеющие манипулятора, но и управляемые тележки AGV 16Аналогично в толковом словаре по робототехнике и искусственному интеллекту Пройдакова Э. М. к промышленным роботам относят и манипуляторы, и средства транспорта (промышленный робот - это программируемое устройство, предназначенное для манипулирования и транспортирования деталей, инструментов, специализированной технологической оснастки и выполнения разнообразных операций с ними, т. е. робот, предназначенный для работы в производственных условиях)..
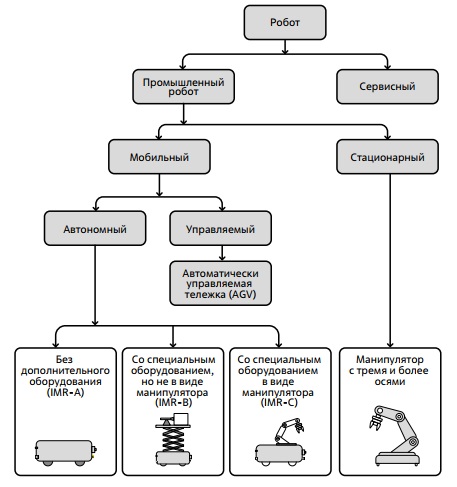
Согласно классификации мобильных промышленных роботов (рис. 4.34), IMR-А - это базовый тип автономного мобильного промышленного робота без какого-либо дополнительного (навесного) оборудования [104]. Робот данного типа может прокладывать оптимальный путь до места назначения, перевозить предметы, действует как независимая система и не требует внесения изменений в рабочую среду. IMR-B состоит из базы в виде IMR-A и активного или пассивного специального оборудования (конвейеры, роликовые столы, подъемные устройства, фиксированные ящики и т. д., за исключением манипуляторов).
IMR-С также базируется на платформе IMR-А, на которой можно установить мобильный манипулятор, кобот и другие типы исполнительных механизмов для использования в таких задачах как инспекция, транспортировка материалов, обслуживание машин и т. д.
Комментируя сложность проведения четкой границы между разными классами машин по степени автономности (как, например, между интеллектуальными AGV и AMR), следует привести известную пятиступенчатую шкалу классификации автономности беспилотно- го автомобиля (см. табл. 4.3). Здесь уровень автономности 0 - это машина, полностью управляется человеком, а уровень автономности 5 - это машина, у которой в принципе нет руля. То есть верхняя и нижняя границы в этой шкале соотносятся с машинами совершенно разных классов - одна беспилотная, другая нет. А граница между другими уровнями размыта.
Автономная навигация
Мы уже начали разговор о навигации мобильных роботов, сравнивая возможности AGV и AMR. Далее рассмотрим понятие навигации роботов более подробно.
В самом общем плане навигация - это наука о способах выбора пути и методах перемещения судов, наземных, летательных и космических аппаратов. Под автономной навигацией робота понимается его способность определять свое собственное положение в пространстве и затем планировать путь к некоторой цели.
По сути, робот должен выполнять ту же задачу, что и человек-турист, который определяет свое положение на карте (например, с помощью GPS/ГЛОНАСС), прокладывает путь из точки А в точку Б и следует по этому маршруту, полагаясь на ориентиры. Автономная навигация робота включает те же действия, но без участия человека, то есть в процессе движения к цели мобильный робот не получает команд и данных от оператора.
Автономная навигация может быть достигнута на основе эвристических алгоритмов - относительно простых правил, которые не гарантируют оптимального решения задачи, но могут быть эффективны и требуют ограниченного объема информации при решении задачи.
Достижение цели может также осуществляться через поиск оптимальной стратегии, для которого, как правило, требуется больше информации об окружающей среде.
Например, если роботу пылесосу задать простейший алгоритм поведения: при каждом столкновении с препятствием менять свое направление случайным образом, - то при бесконечном количестве отражений он очистит от пыли всю комнату, однако очевидно, что это будет очень долгий неоптимальный процесс.
Оптимальной будет стратегия, при которой робот не пылесосит одно и то же место по нескольку раз. Для того чтобы выполнить задачу подобным образом, роботу необходимо получить представление об окружающей среде (карте), определить свое текущее положение в ней и построить такой маршрут, чтобы он мог очистить комнату, объезжая препятствия и не посещая те места, в которых уже находился ранее.
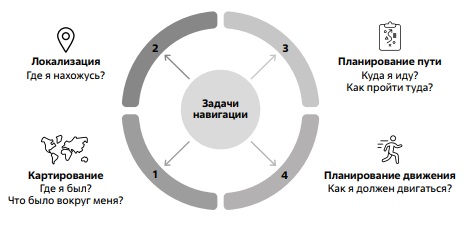
Обычно выделяют три технологии/метода в навигации роботов (картирование, локализация и планирование пути) или четыре (в этом случае добавляется "Планирование движения") (рис. 4.35). Последнее нужно не во всех роботах. Например, оно необходимо в шагающих механизмах: планирование пути задает траекторию от начальной до конечной точки, а планирование движения определяет длину и высоту каждого шага, чтобы от этой траектории не отклониться.