Совместное развитие сенсорики и робототехники
От телеуправления к автономности и обратно
Мы достаточно подробно проследили путь эволюции и устройство автономных программируемых промышленных роботов и мало уделили внимания телеуправляемым устройствам. В данной лекции поговорим об эволюции телеуправляемых роботов и примерах их применения.
Говоря об истоках формирования робототехники, мы отметили важную роль первых манипуляторов с дистанционным механическим управлением, которые использовались еще в 1940-х годах в зарождающейся атомной промышленности (см. рис. 2.5).
Следующей ступенью развития манипулятора с удаленным управлением для работы в агрессивных средах можно считать систему, изображенную на рис. 4.12, где уже нет непосредственной механической связи между элементами ручного управления и исполнительны- ми органами, а передача команд осуществляется по кабелю в режиме телеуправления 4Дальнейший рост технологий привел к очередному витку развития манипуляторов для работы в замкнутых камерах. Так, в 2022 г. в ЦНИИ РТК был разработан телеуправляемый манипулятор для работы в горячих камерах с повышенным уровнем ионизирующего излучения. Среди нововведений следует отметить возможность реализации программного режима управления манипулятором. Траектории движения манипулятора планируются в среде виртуальной реальности, а оператор имеет возможность отслеживать выполнение целевой задачи.
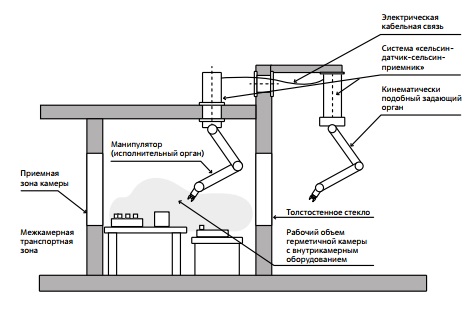
Источник: [ "Источники использованной литературы" ]
Говоря об эволюции манипуляторов, функционирующих в режиме телеуправления, полезно обратиться к рис. 4.13, где демонстрируются три стадии развития: 1) непосредственное (прямое) ручное управление; 2) совместное управление; 3) так называемое супервизорное управление.
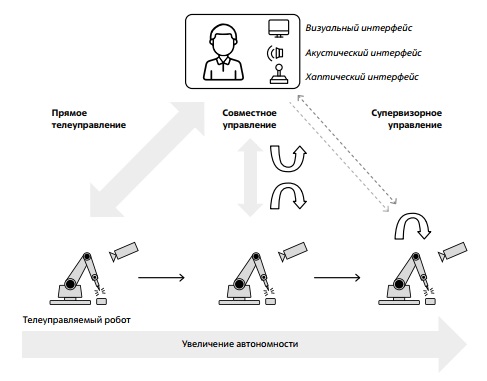
Рис. 4.13. Различные типы архитектур управления в зависимости от степени автономности ведомого робота
Источник: [ "Источники использованной литературы" ]
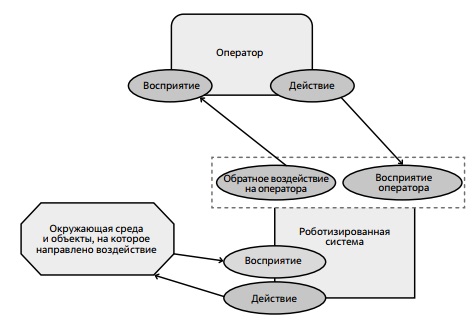
На рисунке представлен человек-оператор, имеющий акустический, визуальный и хаптический интерфейсы взаимодействия с ро- ботом. Хаптический, по сути, объединяет два интерфейса: 1) кинестетической обратной связи (передает сигнал на мышечные сенсоры человека и 2) тактильной обратной связи (передает сигнал на кожные сенсоры).
Увеличение автономности телеуправляемого робота можно представить как этапы снижения степени участия человека-оператора.
Прямое телеуправление (левая часть изображения) подразумевает, что человек управляет всеми движениями робота, осуществляя так называемое ручное управление или прямое манипулирование. Оператор управляет всеми движениями ведомого робота, который, как марионетка, следует за движениями человека.
Совместное управление (второй этап - центральная часть изображения) предполагает, что роботы приобретают возможности выполнения простых повторяющихся операций автоматически, без участия человека. При этом оператор может управлять полуавтономным роботом, подавая лишь высокоуровневые команды, что позволяет снизить нагрузку на человека.
Прямое управление может быть неэффективно в случае значительных временных задержек в канале связи в космических или интернет-приложениях. Для таких задач более эффективно использование совместного управления, основанного на локальных контурах обратной связи и автономном выполнении подзадач на ведомом объекте.
Человек задает грубые команды движения с помощью кинестетического устройства, которые настраиваются (уточняются) телеоператором-роботом ( рис. 4.14).
Супервизорное управление подразумевает, что оператор посылает высокоуровневые команды/задачи, а робот, обладающий ИИ, производит автономные действия для их исполнения.
При супервизорном управлении оператор выступает в роли супервайзера. Человек дает высокоуровневые задания, робот использует локальные сенсорные контуры обратной связи. При таком подходе может быть реализовано телепрограммирование на уровне задач. Такая архитектура позволяет использовать два контура управления, работающих параллельно. Один работает на реальной удаленной системе, которая содержит внутреннюю обратную связь для автономного выполнения локальных задач. Другой контур реализует моделирующую среду, которая не подвержена задержкам в канале связи и которая является предиктивной по отношению к реальной системе. Авторы рис. 4.14 выделяют не три, а целых шесть стадий роста автономности робота, обозначая все меньшее участие человека в процессе управления.
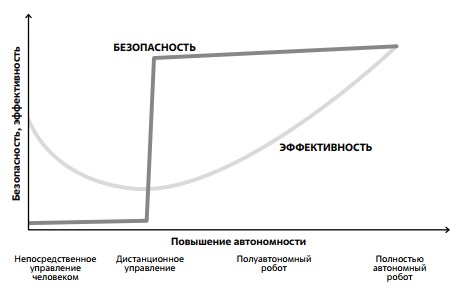
При этом, говоря об увеличении степени безопасности по мере роста автономности роботов (рис. 4.16), следует отметить, что переход от непосредственного ручного (не удаленного) управления к дистанционному безопасность для оператора резко возрастает и затем уже меняется незначительно по мере роста возможностей робота выполнять удаленные миссии в полуавтоматическом и полностью автоматическом режиме.
Чтобы быть эффективным, телеуправление должно обеспечивать стабильность (способность противостоять внешним возмущениям) и качество (предоставлять пользователю адекватное ощущение погружения в удаленную среду), необходимое для выполнения задач и предотвращения столкновения телеуправляемого робота с окружающими предметами.
Ощущение присутствия достигается за счет способности системы обеспечивать детальную визуализацию удаленной среды при минимальном влиянии ограничений поля зрения, частоты кадров и задержки передачи изображения.
Дистанционное управление с использованием видеонаблюдения - это процесс, требующий обучения операторов и имеющий ряд ограничений, в том числе связанных с недостаточным восприятием глубины сцены.
Использование технологий дополненной и виртуальной реальности, которые представляют собой интерактивную компьютерную симуляцию, позволяет улучшить восприятие путем визуальных подсказок, создать эффект более качественного погружения оператора в моделируемую среду (рис. 4.17).

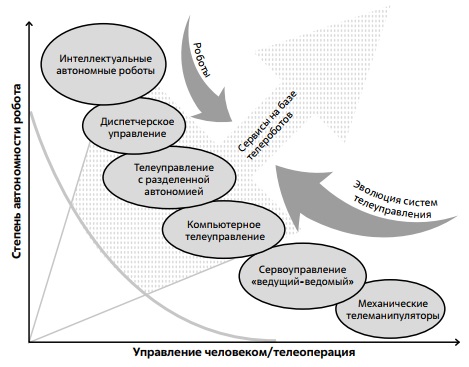
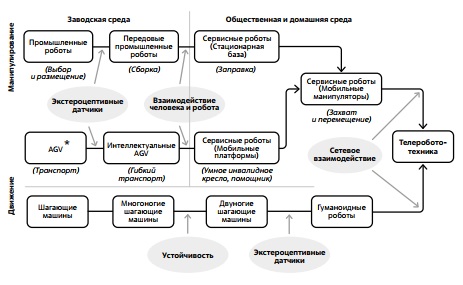
Одни специалисты, рисуя картину эволюции роботов, показывают тенденцию развития от телеуправления в сторону роста автономности, другие, такие как, например, авторы рис. 4.18, выстраивают противоположную логику. Они демонстрируют, как рост технологий мобильности, совершенствование сервисных роботов и новые возможности связи (сокращение задержки) выводят телеуправляемых роботов на новый уровень, представляют телеманипуляцию как передовой тренд эволюции робототехники.
*AGV - Automated Guided Vehicles - управляемые транспортные средства 5AGV - это управляемые колесные транспортные средства для горизонтальной транспортировки грузов без участия оператора или водителя, которые следуют по заранее заданному пути )