Совместное развитие сенсорики и робототехники
Аббревиатура ToF (Time of flight) на рис. 4.2 обозначает время пролета, то есть время прохождения волны (акустической, электромагнитной и т. д.) через какую-либо среду, используемое для измерения длины пройденного пути. Соответственно, зная время прохождения луча до объекта и обратно, можно вычислить расстояние до этого объекта. ToF-данные позволяют получить карту расстояний ( рис. 4.4).

Источник: [ "Источники использованной литературы" ]
Круговой лидар (sweeping LiDAR) - это тип устройства, в котором используется вращающийся лазерный сканер для 360-градусного обзора окружающей среды. Такой лидар позволяет получить серию облаков точек, представляющих трехмерную структуру окружающих объектов. Анализ облаков точек позволяет формировать представление об окружающей среде в реальном времени.
В ToF-камерах используется тот же принцип действия, что и в лидарах, LiDAR использует лазерные лучи, а датчики ToF используют инфракрасный свет. По этой причине LiDAR может предоставить более точные и подробные данные, но, как правило, он более дорогой и сложный. Датчики ToF обычно дешевле и компактнее, при этом их точность приемлема для многих мобильных роботов.
Радары действуют по схожим принципам, но вместо оптических сигналов они используют электромагнитные волны.
Системы компьютерного зрения, обозначенные на рис. 4.2, можно разделить по способу освещения на пассивные и активные.
Пассивные работают с изображениями, полученными в естественных условиях освещения, а активные используют генераторы излучения, такие как лазерные дальномеры, системы со структурированной подсветкой и т. д.
В качестве пассивного метода можно привести методы измерения расстояния до объекта на основе изображения с использованием двух камер (стереозрение) и с использованием одной камеры (монокулярное зрение).
Метод стереозрения для определения глубины объекта обладает более высокой точностью.
Система стереоскопии функционирует подобно человеческому глазу: две 2D-камеры получают изображение объекта с двух разных точек и рассчитывают трехмерные данные глубины.
К методам с активным освещением можно отнести лазерную триангуляцию и сканеры со структурированным светом.
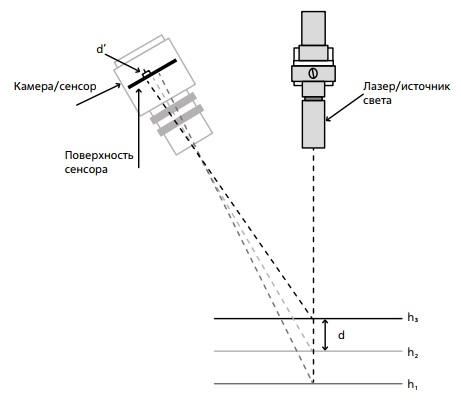
Лазерная триангуляция - это метод измерения расстояния с использованием тригонометрии. Он предполагает проецирование лазерного луча на поверхность объекта и определение расстояния на основе изменения положения или угла отражения лазерного луча.
Когда лазерный луч попадает на поверхность, он частично отражается и регистрируется датчиком.
Положение или угол, под которым обнаруживается отраженный лазерный луч, дает информацию о расстоянии между объектом и датчиком. Механизм иллюстрируется на рис. 4.5. Пунктирные линии разной интенсивности иллюстрируют, как отраженный лазерный свет попадает на различные участки датчика в зависимости от расстояния между источником лазерного излучения и объектом контроля. При изменении расстояния до точки контроля (h1 - h3) изменяется и место обнаружения луча на датчике. Изменения вертикального расстояния от линии h2 на расстояние d до уровня h3 приводят к пропорциональным отклонениям луча (на расстояние d') на датчике.
Сканеры со структурированным светом также использует тригонометрическую триангуляцию, но на сканируемый объект проецируются не лазерные линии или точки, а световой узор. Камеры, расположенные на небольшом расстоянии от проектора, следят за формой светового рисунка и рассчитывают расстояние до каждой точки в поле зрения.
Таким образом, существуют разные виды датчиков расстояния, позволяющие получить информацию об окружающей обстановке робота. В разных условиях они проявляют различную эффективность. На рис. 4.6 приведено сравнение разных датчиков на основе девяти параметров по пятибалльной системе. Например, в параметре "Цена" 5 баллов означает самую низкую стоимость датчика, а 1 балл - самую высокую.
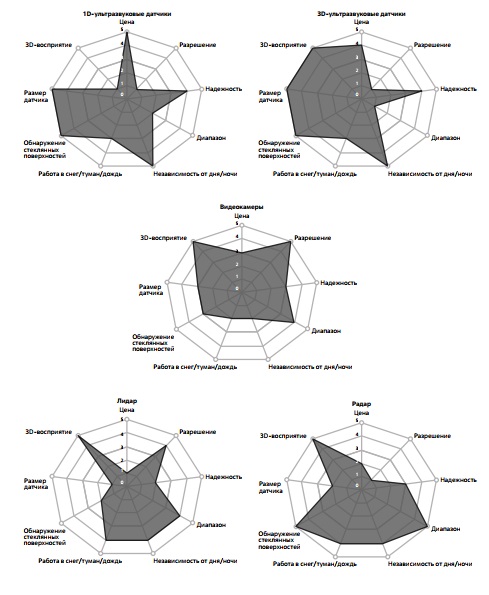
Рис. 4.6. Сравнение датчиков, часто используемых в робототехнике. Источник: IDTechEx, Sensors for Robotics 2023-2043: Technologies, Markets, and Forecasts
Примеры использования датчиков В стационарных и мобильных роботах
Далее рассмотрим несколько примеров использования датчиков в роботах разного типа.
На рис. 4.7 демонстрируется пример возможного расположения датчиков в промышленном SCARA-роботе.
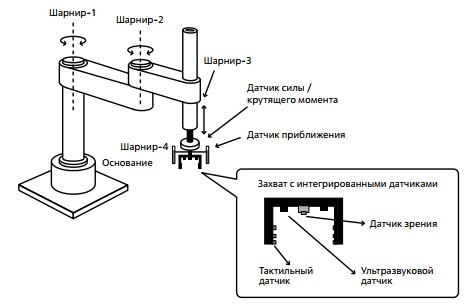
Как показано на рисунке, на запястье робота установлен датчик силы/крутящего момента, в концевом эффекторе робота установлены два датчика приближения, которые определяют наличие или отсутствие какого-либо объекта. В захвате расположены также датчик зрения и тактильный датчик для определения давления, оказываемого захватом на объект.
На рис. 4.8 показана схема сопряжения датчиков с роботом.
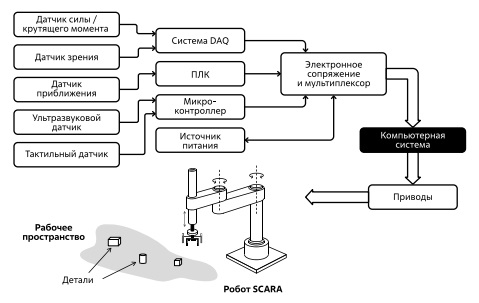
Информация от сенсоров проходит через DAQ 3DAQ расшифровывается как Data Acquisition (система сбора данных). DAQ используется для сбора данных с различных датчиков, осуществляет первичную обработку, накопление и передачу данных и ПЛК и формирует управляющее воздействие на приводы.
На рис. 4.9 представлена совокупность датчиков, которые обеспечивают роботу-собаке восприятие окружающей среды и возможность взаимодействия с ней.
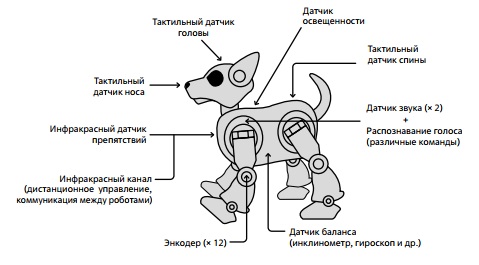
Источник: [ "Источники использованной литературы" ]
На рис. 4.10 на условном примере мобильного робота показаны разные варианты использования датчиков. Робот может осуществлять навигацию с помощью машинного зрения, ориентируясь по меткам на полу, указывающим направление движения, может использовать GPS-навигацию и другие технологии, который были рассмотрены выше.
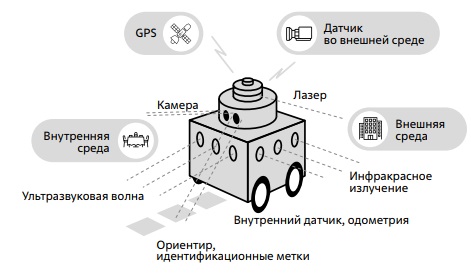
Источник: [79]
Упомянутый на рисунке термин "одометрия" относится к использованию датчиков движения для оценки изменения положения робота во времени. В частности, технология используется в колесных роботах для оценки их положения относительно начальной точки. Обычно в системе одометрии используются энкодеры, считывающие угол поворота колес. Зная количество оборотов и диаметр колеса, нетрудно вычислить пройденное расстояние. Одометрия - простое и недорогое средство, которое дает хорошую точность при движении без проскальзывания и при малых отрезках пройденного роботом пути, однако при его увеличении приводит к накоплению погрешностей и, соответсвенно, увеличению риска ошибки ориентации.
На рис. 4.11 показаны датчики, используемые в легковом автомобиле.
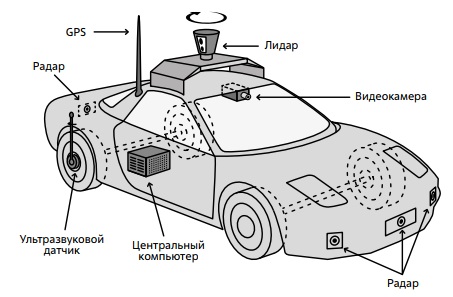
Источник: [ "Источники использованной литературы" ]
Ультразвуковые датчики служат для измерения положения объектов, расположенных в непосредственной близости к автомобилю (бордюры и автомобили на парковке). Лидар, устройство, которое мы подробно рассмотрели выше, строит полноценную картину местности, в которой видны не только другие машины, но также края дороги, изъяны дорожного покрытия и рельефная разметка.
Радарные датчики отслеживают положение других автомобилей поблизости. Такие датчики используются в системах круиз-контроля, позволяя автомобилю сохранять заданную скорость движения. Видеокамеры определяют сигналы светофора, считывают дорожные знаки, отслеживают положение других транспортных средств и препятствия на дороге. GPS-сигналы комбинируются с показаниями инерциальных измерительных модулей, которые обычно состоят из гироскопа, акселерометра, и других датчиков, позволяют обеспечить позиционирование автомобиля. Информация от всех датчиков анализируется центральным компьютером, который контролирует ускорение, торможение и рулевое управление.