Совместное развитие сенсорики и робототехники
Какая технология должна получать больше внимания - дистанционное или автономное управление, какая из них сулит прорыв в ближайшей перспективе? Как обычно, есть приверженцы и той и другой точек зрения. Сторонники развития телеуправления часто приводят пример с беспилотными автомобилями, которые как концепция существует десятки лет, постоянно развивается, но чем ближе технология подходит к желанному финишу, тем медленнее идет развитие. Поэтому потребность в безопасном телеуправлении остается, и актуальность этой задачи не снижается. Отражая данную ситуацию, авторы рис.4.18 показывают, что вектор развития сервисов на базе телероботов - это не просто этап в развитии робототехники, а отдельное равноценное направление.
Телеуправление и автономная робототехника имеют свои сферы применения. Существует большой класс задач, где присутствие человека затруднено, автономные роботы не достигли пока уровня человека в принятии решений, а телеуправление дает хорошие результаты, объединяя в совместной работе интеллект человека и возможности роботов. И телеуправление тоже эволюционирует, открывая все новые возможности по мере развития мехатроники, сенсоров, технологий связи и искусственного интеллекта.
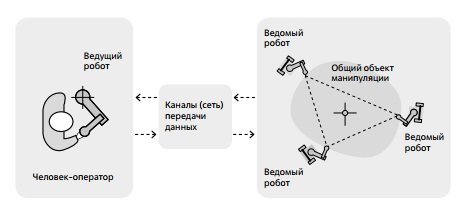
Выше были рассмотрены системы телеуправления с одним оператором (ведущим) и одним ведомым роботом, возможны варианты с одним ведущим и несколькими ведомыми (рис. 4.19), а также с несколькими ведущими и одним ведомым, с несколькими ведущими и несколькими ведомыми.
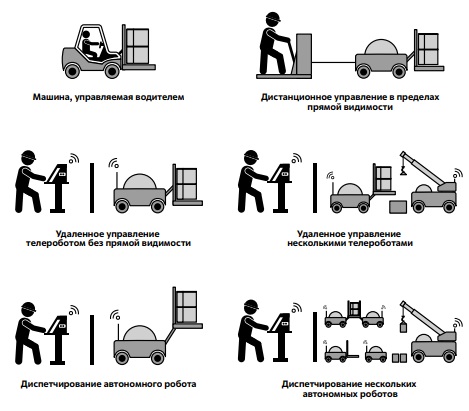
Резюмируя большинство рассмотренных нами случаев телеуправления одиночными роботами и группой роботов, общую картину можно представить в виде классификации на рис. 4.20.
Эволюция взаимодействия человека и робота - процесс достаточно сложный, дать единую классификацию роботов с точки зрения характера взаимодействия с человеком достаточно сложно. Попытку свести большое число параметров классификации роботов с упором на характер взаимодействия робота и человека можно рассмотреть с помощью табл. 4.1.
| Направление классификации | Параметры классификации |
|---|---|
| Канал связи на входе |
|
| Канал связи на выходе |
|
| Взаимодействие человека и робота в пространстве |
|
| Взаимодействие человека и робота во времени |
|
| Роль человека |
|
| Состав команды |
|
| Задачи робота |
|
| Степень автономности робота по ряду параметров: |
|
| Морфология робота |
|
| Область применения робота |
|
| Условия применения робота |
|
От промышленных к сервисным и персональным роботам
После того, как был введен целый ряд понятий, касающихся промышленных и сервисных роботов, можно продолжить разговор об эволюции этих устройств.
В большинстве публикаций сервисные роботы рассматриваются как определенная стадия развития роботов, как шаг в направлении интеллектуализации машин по отношению к промышленным роботам. Ранее (на рис. 2.4) было показано, что сервисные роботы (как массовый рынок) возникли в самом конце прошлого века. Это не означает, что роботы непромышленного применения не производились ранее. Как было отмечено, уже в конце 1960-х годов прошлого века был создан мобильный робот Shakey, который вполне может быть назван прообразом современных сервисных роботов. Однако коммерческое применение таких машин произошло значительно поз же. Для осуществления сервисных функций в самых разных отраслях роботу потребовались новые интеллектуальные способности. На разработку интеллектуальных машин, которые могли бы автономно функционировать в непосредственной близости от человека и взаимодействовать с ним, ушло определенное время.
Сервисные роботы нашли широкое распространение в самых разных индустриях и постепенно начали проникать в дом человека.
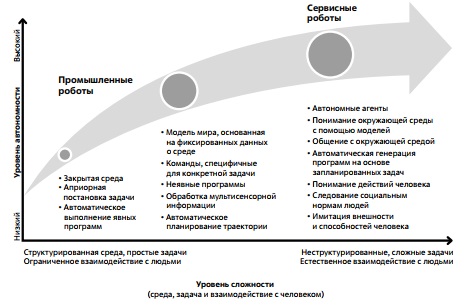
Логику развития робототехники можно описать условной траекторией, представленной на рис. 4.21. Сначала промышленные роботы (отгороженные от человека) выполняли скучные повторяющиеся действия, с высокой точностью заданные программой, и не контактировали с человеком. Потом появились коботы - машины для сотрудничества с человеком в производственной деятельности. Затем роботы стали приобретать все новые сервисные функции, все больше интеллектуальных возможностей, обеспечивающих сосуществование с человеком в самых различных пространствах. Они становились компаньонами, советчиками, помощниками в профессиональной деятельности и в домашнем хозяйстве 6Конечно, описанная логика развития говорит про некий общий тренд, и имеются исключения в том смысле, что можно найти примеры моделей недорогих сервисных роботов, которые будут обладать меньшими интеллектуальными способностями, чем отдельные дорогие продвинутые модели промышленных роботов.