Совместное развитие сенсорики и робототехники
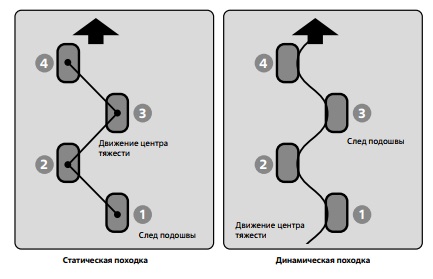
В случае хождения на двух ногах различие статической и динамической походки может быть проиллюстрировано рисунком (рис. 4.28).
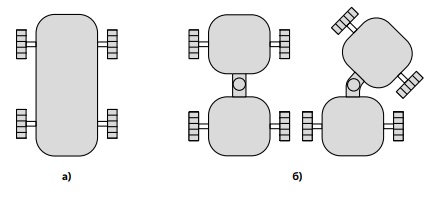
Колесные роботы могут иметь жесткозащемленную13 Жесткое защемление или жесткая заделка в механике определяет условия, когда концы балки жестко зафиксированы на опоре и, в отличие от шарнирного закрепления, повернуться не могут плоскую раму (рис. 4.29 (а)) и шарнирную (рис. 4.29 (б)) раму. Во втором случае робот состоит из двух или более секций, каждая из которых сое- динена шарнирами, позволяющими машине изгибаться, обеспечивая возможность лучше преодолевать пересеченную местность или подниматься по крутым склонам.
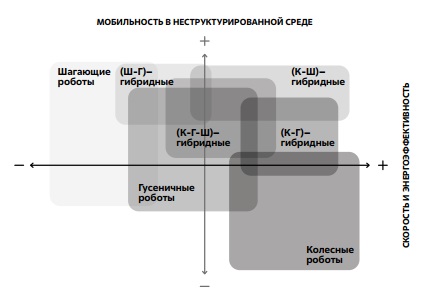
Очевидно, что для каждого ландшафта существуют свои варианты оптимальной конструкции машины. Шагающие роботы ожидаемо являются наиболее тихоходными, однако проявляют высокую мобильность в неструктурированной среде. Они могут передвигаться по заснеженным склонам, лестницам, по неровной поверхности и т. п. Напротив, колесные роботы обеспечивают максимальную скорость, но только в условиях хорошей (структурированной) дороги (см. рис. 4.30).
Беспилотные летательные аппараты (летающие роботы)
В данном разделе будем рассматривать такую широкую категорию как БПЛА 14Также широко встречается в отечественной терминологии аббревиатура БВС (беспилотные воздушные суда). Отметим, что данный термин ближе к оригинальному UAV Unmanned Aerial Vehicles. Есть также аббревиатура БЛА (беспилотные летательные аппараты). Некоторым специалистам наличие буквы "П" кажется малообоснованным. Есть также аббревиатура БАС - беспилотная авиационная система. БАС - это система, состоящая из дрона (или нескольких дронов), его бортового оборудования и наземного управления. (Прим. ред.) - летательные аппараты, которые используются как внутри, так и вне помещения в широком спектре гражданских и военных применений.
Классифицируя БПЛА по весу и дальности, Международная ассоциация по беспилотным системам AUVSI (Association for Unmanned Vehicle Systems International) выделяет семь категорий [ "Источники использованной литературы" ] от микро- и мини-БПЛА ближнего действия (до 5 кг и до 10 км) до тяжелых БПЛА большой продолжительности полета (более 1500 кг и с дальностью действия более 500 км).
Говоря о классификации БПЛА по способу полета, полезно обратиться к рис. 4.31, согласно которому все БПЛА можно разделить на 5 категорий.
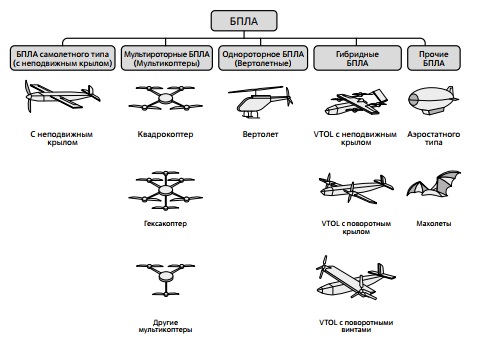
БПЛА самолетного типа с неподвижным крылом - это аппараты горизонтального взлета и посадки, которые движутся по взлетно-посадочной полосе в горизонтальном направлении подобно большинству пассажирских самолетов. Достаточно часто для обозначения данных конструкций используется аббревиатура HTOL (от англ. Horizontal take-off and landing).
Мультироторные БПЛА (мультикоптеры) - это аппараты вертикального взлета и посадки, способные взлетать и садиться вертикально, без использования взлетно-посадочной полосы, а также зависать в воздухе. Роторов может быть два, три и более (квадрокоптеры, пентакоптеры и т. п.). Для обозначения аппаратов вертикального взлета используется сокращение VTOL (Vertical take-off and landing).
Однороторные БПЛА вертолетного типа тоже обладают возможностью вертикального взлета, зависания и посадки.
Категория "гибридные БПЛА" включает устройства, которые обладают как возможностями VTOL, так и HTOL аппаратов. Например, гибридный VTOL c неподвижным крылом имеет две независимые системы: для зависания (подъемные роторы) и для горизонтального полета (толкающие). При вертикальном взлете летательный аппарат использует подъемные роторы. На этом этапе толкающий двигатель отключается, и летательный аппарат ведет себя как квадрокоптер. После набора заданной высоты БПЛА переходит на толкающий двигатель для набора скорости. После достижения нужной высоты подъемные роторы выключаются, и аппарат ведет себя как самолет с фиксированным крылом. Существуют конструкции с поворотным крылом, соответственно, имеющие возможность поворачивать ротор вместе с крылом. Также существуют модели с поворотными роторами.
Прочие БПЛА - это, например, аппараты аэростатного типа (летательные аппараты легче воздуха) или биовдохновленные махолеты.
Хотя к настоящему времени беспилотные летательные аппараты и мультикоптеры, в частности, стали обычным явлением в таких областях, как фотосъемка или топографическая съемка, разработчикам еще предстоит провести большую исследовательскую работу в тех областях, где летательные аппараты должны воздействовать на окружающую среду, вступая с ней в прямой контакт, осуществляя так называемую "воздушную манипуляцию". Под воздушной манипуляцией предполагаются захват, транспортировка, позиционирование, сборка и разборка механических частей, измерительных приборов и любых объектов, выполняемые с помощью БПЛА, оснащенных небольшой роботизированной рукой (руками) и захватом (захватами). Подобные системы носят в значительной степени гибридный характер, совмещая программно-аппаратный комплекс как для полетов, так и для роботов-манипуляторов.
Водные мобильные роботы
Предназначенны для использования на воде и под водой. Водные роботы могут различаться по размеру, глубине погружения, степени автономности и по принципу движения в воде.
Авторы статьи [ "Источники использованной литературы" ] выделяют три типа роботов, перемещающихся в воде, - это плавающие по воде, плавающие под водой и передвигающиеся по дну (под водой). Плавающие по воде могут использовать реактивный двигатель, гребной винт, плавники, паруса, частично погружаясь в воду или осуществляя скольжение по поверхности воды. Плавающие под водой осуществляют движение с помощью гребного винта, плавников, волнообразного движения тела или реактивного движения. Перемещающиеся по дну могут двигаться с помощью ног, гусениц или присосок, осуществляя ходьбу, ползанье или качение.
Существует большое разнообразие водных биовдохновленных роботов, имитирующих действия различных животных, обитающих в водной стихии: дельфинов, кальмаров, змей, рыб.
Водные роботы находят массу применений как в гражданских приложениях (для осмотра морских нефтяных платформ, трубопроводов и для научных исследований), так и в военных целях.
От управляемой к автономной навигации
Мы уже отметили в начале данной лекции, что тренд на рост автономности мобильных роботов не отменяет роста спроса на телеуправляемых роботов. Тем не менее вектор, связанный с развитием мобильной автономности, - это одно из важнейших направлений развития робототехники.
При этом важно отметить, что переход от управляемой навигации к беспилотной происходит постепенно, в силу чего классификация мобильных роботов в ряде случаев осложняется.
Заметим, что термин БПЛА относится как к автономным, так и телеуправляемым летательным аппаратам, которые могут функционировать без присутствия пилота на борту. В режиме телеупраления пилот или оператор на земле управляет летательным аппаратом с помощью дистанционного управления, используя команды и обратную связь. Несмотря на то что в данном случае летательный аппарат управляется оператором, его все равно относят к категории БПЛА, поскольку он не имеет человека на борту 15 Мы уже отмечали, что граница между БПЛА и летающими роботами четко не определена. Ряд авторов полагают, что часть телеуправляемых БПЛА, имеющих минимальную автономность и отсутствие рабочих органов, таких как, например, средства выгрузки полезной нагрузки, не следует называть роботами, другие причисляют к роботам большую часть БПЛА.
При этом выделяют пять градаций, так скажем, "беспилотности" БПЛА (см. табл. 4.2).
| Уровень | Степень автономности | Степень управления со стороны пилота | Избегание препятствий | Дополнительная информация |
|---|---|---|---|---|
| 0 | Нет автономности | Пилот контролирует 100% времени | Дрон не видит и не реагирует на препятствия | Дрон разбивается без участия пилота |
| 1 | Низкая автономность | Пилот осуществляет контроль | Дрон обнаруживает и предупреждает | Дрон может оставаться в воздухе без пилота |
| 2 | Частичная автономность | Пилот осуществляет контроль | Обнаружение и предупреждение | Дрон может стабилизироваться и останавливаться возле препятствий |
| 3 | Условная автономность | Пилот является резервной системой, работающей на месте | Обнаружение и избегание | Дрон может летать и автоматически избегать препятствий |
| 4 | Высокая автономность | Дрон может осуществлять полет без постоянного контроля со стороны пилота при определенных условиях | Обнаружение и навигация | Дрон может автономно картографировать землю и ориентироваться в непогоду |
| 5 | Полная автономность | Пилот задает цель, но дрон не нуждается в контроле | Обнаружение и навигация | Дрон может летать при любых условиях |
Причем ровно столько же уровней выделяется и в эволюции беспилотного автомобиля (табл. 4.3).
| N | Уровень автономности | Описание уровня |
|---|---|---|
| 0 | Нет автономности | Машина полностью управляется человеком |
| 1 | Помощь водителю | Автомобиль управляется человеком, имеется функция помощи в управлении, ускорении/ торможении |
| 2 | Частичная автономность | Контроль со стороны человека снижен за счет наличия автоматизированной системы, которая одновременно контролирует рулевое управление и ускорение |
| 3 | Условная автономность | Человек должен реагировать и вмешиваться, когда это необходимо, все остальное время автомобиль управляется автоматизированной системой |
| 4 | Высокая автономность | В определенных областях и при определенных состояниях окружающей среды управление автомобилем полностью контролируются автономной системой вождения |
| 5 | Полная автономность | Во всех районах передвижения и при всех состояниях окружающей среды управление автомобилем полностью контролируется автономной системой вождения |