Совместное развитие сенсорики и робототехники
На этом пути роботы получали все больше автономности, возможности функционировать в заранее неопределенной среде, развивались технологии сенсоров, совершенствовались методы программирования. В частности, на рисунке отмечен переход к неявному программированию.
В самом общем плане неявное программирование подразумевает программирование роботов, использующее не прямые инструкции, а более простой для написания код, формирующий инструкции на более низком, "невидимом" оператору уровне. Неявные программы предполагают, что основное внимание уделяется описанию того, что должно быть достигнуто, а не тому, как именно это должно быть сделано 7В программировании понятие "неявный" часто используется для обозначения того, что в неявном виде за вас делает другой код "за кулисами". Явный подход - это ручной подход к выполнению желаемых изменений путем написания инструкций, которые должны быть выполнены в явном виде.
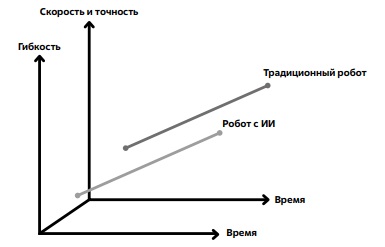
Следует отметить, что переход к сервисным роботам подразумевал изменение самой концепции развития. Если стратегия развития традиционных промышленных роботов состоит в постепенном увеличении таких параметров как скорость, точность, грузоподъемность (рис. 4.22), то для сервисных роботов, снабженных ИИ, - это стратегия наращивания гибкости в смысле способности адаптации к разным средам, то есть умение выполнять разные задачи, действуя во все более непредсказуемой среде.
При этом мы отмечали, что процесс эволюции роботов имеет сходство с развитием живых организмов и количество модификаций роботов под все новые отрасли и задачи с разным набором возможностей растет быстрыми темпами.
Роботы занимают все новые ниши, сервисные и промышленные роботы приобретают новые возможности, и граница между ними в ряде практических приложений становится размытой. Кроме того, в одних направлениях роботы эволюционируют быстрее, чем в других. То есть эволюция роботов не означает, что более простые роботы теряют свое предназначение. В зависимости от задачи и бюджета робот может быть более простым или более сложным (менее и более совершенным в плане интеллектуальных способностей).
По мере развития интеллекта роботов перед ними ставились все более амбициозные задачи, например такие, как обеспечение автономной мобильности.
Говоря об интеллектуализации роботов и продолжая тему классификации, полезно обратиться к рис. 4.23, авторы которого предлага- ют ранжировать роботов по трем уровням: "автоматический", "авто- номный" и "осознающий".
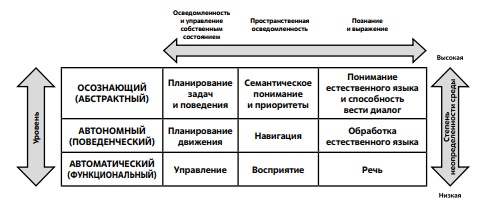
Автоматический режим робота - это состояние, в котором управляемый робот исполняет работы в соответствии с программой, заданной человеком.
В качестве примера можно говорить о промышленных роботах на сборочной линии, где сборка осуществляется исходя из фиксированного набора инструкций. Подобным роботам не нужен сложный интеллект, от них требуется быстрая, точная, надежная и устойчивая работа.
Если мы говорим о традиционных промышленных роботах (не коботах), они программируются техническим специалистом для выполнения конкретной задачи в условиях, когда роботы и люди работают с минимальным пересечением.
К автоматическим системам также относят высокоуровневые системы телеуправления (системы супервизорного уровня), где робот способен выполнять задачи самостоятельно, но нуждается в определенной степени контроля со стороны человека, например космические или хирургические роботы.
Автономный робот может выполнять задачи в неопределенной среде с минимальным контролем со стороны человека. Например, беспилотные автомобили и роботы-доставщики, которые используют датчики, анализируют сцену и принимают решения о безопасном движении.
Осознающим робота можно (условно) назвать, если он может установить двустороннюю связь и взаимодействовать с человеком для решения некоторой проблемы. Роботы данного типа могут воспринимать мир на более высоком уровне абстракции, чем ранее перечисленные машины, и понимать намерения человека на основе вербальных или невербальных сигналов для решения совместных задач в реальной неструктурированной среде.
Хорошим примером является робот, который помогает человеку собрать мебель, работая вместе с человеком, адаптируясь к действиям человека и не мешая ему, слушая команды людей, сообщая, что он видит и обучаясь на демонстрациях. Роботы с управлением на базе языковых моделей, а также морфогенетические роботы 8Концепция морфогенетической робототехники заключается в применении принципов эволюционного развития к робототехнике для создания самоорганизующихся, самореконфигурирующихся и самовосстанавливающихся одно- или мультироботных систем, самостоятельно обучающиеся передвигаться (в одиночку или роями) в неизвестной среде, также приближаются к этому уровню.
От стационарных роботов к мобильным
Эволюция мобильных роботов представляет собой многогранный процесс. В этом процессе можно выделить различные направления, каждое из которых имеет свою собственную логику.
Начальный этап коммерциализации роботов, который условно отсчитывают с 1960-х годов, проходил с опорой на промышленных стационарных роботов. А массовое коммерческое распространение мобильных сервисных роботов произошло существенно позже, в начале двухтысячных годов. Этот процесс сопровождался появлением различного рода манипуляторов на мобильной платформе.
С другой стороны, у мобильных беспилотных машин есть другая (более ранняя) ветвь эволюции - это первые беспилотные торпеды, управляемые бомбы, самолеты, мишени и т. п., которые можно считать прародителями современных беспилотных аппаратов и которые мы упомянули в разделе, где рассматривали этапы развития роботов. Отдельно можно говорить об андроидных шагающих роботах, которые тоже являются мобильными сервисными роботам и имеют свою историю развития.
Разные виды наземных, воздушных и водных беспилотников объединяют общие задачи с точки зрения навигации, локализации и планирования траектории в разных средах функционирования.
Мобильные роботы: эволюция, классификация, базовые технологии
Разговор о мобильных роботах начнем с наиболее простой темы, поговорим об их внешнем виде, механизмах передвижения, вариантах конструктивного исполнения и после этого перейдем к более сложным вопросам - о том, как этими машинами осуществляется автономная навигация.
Механизмы передвижения мобильных наземных роботов
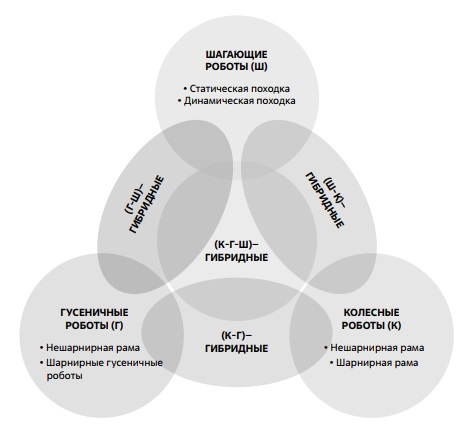
Следуя классификации, предложенной на рис. 4.24, можно выделить пять методов передвижения наземных роботов: 1) ходьба/бег/ прыжки (с помощью ног); 2) использование вращающихся элементов (колеса, гусеницы или качение круглого робота); 3) скольжение (на коньках или полозьях); 4) ползание (перистальтическое ползание 9Перистальтическое движение - волнообразное движение вдоль тела, которое используют, например, черви при перемещении. Повторяя удлинение и сокращение определенных частей тела, робот достигает движения вперед и ползание скольжением 10Боковые колебания тела робота, похожие на змеиные движения ); 5) лазание (с использованием брахиации 11От лат. "brachium", "рука" - тип движения, основанный на раскачивании и перебирании руками, используемый обезьянами или прилипания к поверхности).
Конечно, наиболее распространенными являются колесные, гусеничные и шагающие роботы, а также гибридные мобильные платформы, использующие сочетания перечисленных механизмов (рис. 4.24). Поговорим о перечисленных способах передвижения более подробно.
Наземные мобильные роботы
Заметим, что внутри каждого из перечисленных вариантов может быть еще масса модификаций, некоторые из которых представлены на рис. 4.25.
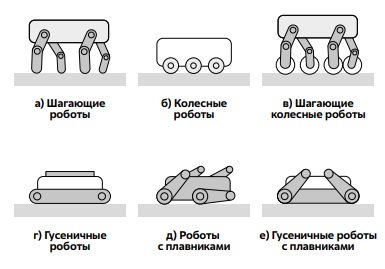
Рис. 4.25. Схематическое представление наземных мобильных роботов с разными системами движения. Источник: Z. Kova?i?
На рис. 4.25 мы показали шагающих четвероногих (квадропедальных) роботов, однако возможны конструкции шагающих роботов, которые имеют одну, две, шесть и большее число ног. Шагающие роботы с числом ног, превышающим четыре, называют многоногими роботами. Аналогично может варьироваться число колес и гусениц, роботы могут иметь также плавники (флипперы 12 Устройство, позволяющее роботу поднять или перевернуть какой-либо предмет, другого робота или самого себя. Механизмы встречается в боевых или исследовательских роботах, которым необходимо переворачивать препятствия или перемещаться по труднопроходимой местности) - рис. 4.25 (д, е).
Наличие колес, гусениц и плавников позволяет преодолевать различные препятствия (см. рис. 4.26 и рис. 4.27).
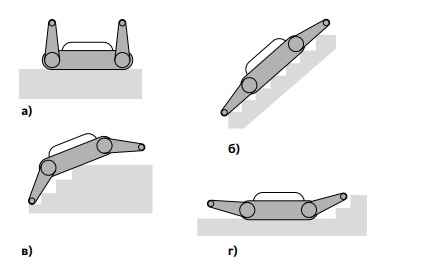
Рис. 4.26. Положение плавников (флипперов) при движении по ровной плоской поверхности (а), при преодолении плоской наклонной поверхности (б), при преодолении неровной поверхности (в), (г) Источник: Francis Colas
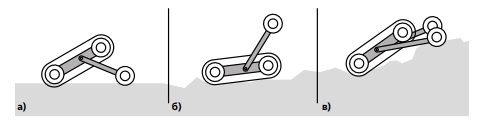
Рис. 4.27. Пример гибридного робота в процессе преодоления различных препятствий. Источник: Luca Bruzzone
На рис. 4.24 были отмечены разные виды шагающих роботов и, в частности, обозначены два вида походки - статическая и динамическая.
Статическая походка - это тип движения, при котором статическая стабильность робота обеспечивается тем, что проекция его центра тяжести находится в границах площади опоры. При статической походке робот передвигает одну ногу за раз, оставляя другие на месте. Ноги перемещаются в согласованном порядке, поддерживая равновесие.
Статическая походка применима лишь при малых скоростях, поскольку при больших скоростях обеспечение стабильности требует учета динамических эффектов движения и становится более сложной задачей.