Промышленные роботы. Путь от клетки к коботам
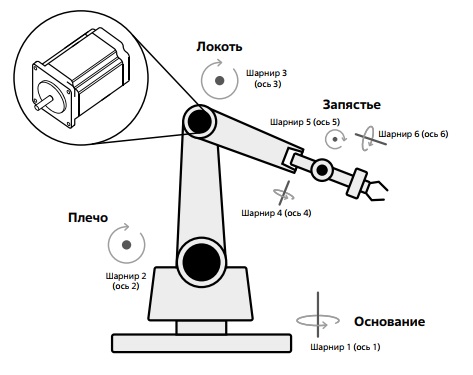
До сих пор мы говорили об эволюции и устройстве роботов, рассматривая самые разные типы этих машин, в данной лекции поговорим более предметно о развитии, устройстве именно промышленных роботов. Но прежде чем продолжить этот разговор, следует ввести ряд понятий. Для этого рассмотрим упрощенную схему современного шарнирного робота (рис. 3.1).
Источник: [ "Источники использованной литературы" ]
Манипулятор, показанный на рис. 3.1, иногда именуется механической рукой и действительно напоминает человеческую руку (рис. 3.2 (а)). Следуя этой аналогии, в некоторых источниках шарнир номер 2 называют плечом, шарнир 3 - локтем и последние три - запястьем.
В шарнирах робота находятся компоненты приводного механизма, такие как электродвигатели и редукторы1Приводы могут быть гидравлические, пневматические или чаще всего электрические - в данном примере будем рассматривать манипулятор с электроприводами . На каждый шарнир приходится как минимум один серводвигатель, который позволяет приводить во вращение "свой" шарнир независимо от остальных.
Первый привод (шарнир 1) должен быть самым мощным - он перемещает не только полезный груз, но и всю конструкцию робота, приводы минимальной мощности находятся в запястье робота.
Шесть вращательных шарниров, показанных на рис. 3.1, обеспечивают шесть степеней свободы, что позволяет роботу перемещаться и манипулировать объектами в трех пространственных направлениях - вперед-назад, вверх-вниз и влево-вправо, а также осуществлять повороты по каждой из этих осей. Сочетание всех шести степеней свободы обеспечивает полный диапазон движений и манипуляционных возможностей робота. Поэтому роботы общего назначения чаще всего имеют именно шесть степеней свободы.
Напомним, что твердое тело, движущееся в трехмерном пространстве, максимально может иметь шесть степеней свободы: три поступательных и три вращательных (рис. 3.2 (б)).
На рис. 3.2 (а) видно, что человеческая рука (без учета пальцев) имеет семь степеней свободы. Плечо - три степени свободы, локоть - один и запястье тоже три, всего - семь. То есть число степеней свободы руки человека является избыточным. Механическая система с количеством контролируемых степеней свободы большим, чем количество физических степеней свободы, называется избыточной.
Существуют роботы-манипуляторы с избыточным числом степеней свободы. Эта избыточность позволяет манипулятору быть более гибким и адаптивным в различных задачах и использовать дополнительные степени свободы для достижения более высокой эффективности выполнения задачи. Например, роботы с избыточным числом степеней свободы способны лучше справляться с выполнением задач в местах с ограниченным доступом. Использование дополнительных степеней свободы позволяет роботу находить оптимальные конфигурации для выполнения задачи, минимизируя риск повреждения среды или объектов. Робот может использовать дополнительные степени свободы для увеличения скорости выполнения задачи, сокращения времени выполнения операций и повышения эффективности работы в целом.
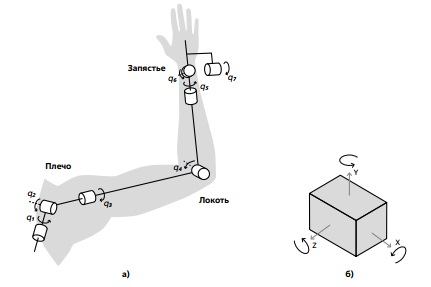
Рис. 3.2. Степени свободы руки человека (а) и максимальное число степеней свободы твердого тела, движущегося в 3D пространстве (б)
К запястью робота крепится сменный инструмент - концевой эффектор - часть робота, которая взаимодействует с окружающей средой и может быть выполнена в форме захвата (как было показано на рис. 3.12) и может также представлять собой различные инструменты (для сварки, сверления, резки или других операций).
Отметим, что число степеней свободы (подвижности) робота не включает степени подвижности концевого эффектора (например, захвата). Последний может представлять собой достаточно сложное устройство, приближающееся по возможностям к кисти человека.
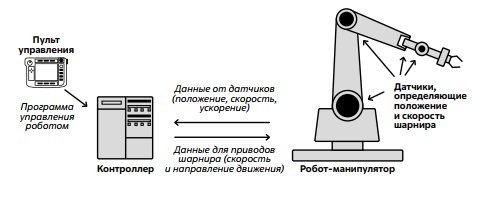
Чтобы робот мог эффективно выполнять свою задачу, необходимо знать параметры его состояния. Эту задачу помогают решать внутренние и внешние датчики. Внутренние дают информацию о положении и скорости шарниров, в то время как внешние собирают информацию из окружающей среды.
Эта информация поступает от датчиков в контроллер ( рис. 3.3), который отвечает за управление и координирует все аспекты работы манипулятора, включая планирование и управление траекториями движения, контроль за силой, скоростью и позицией шарниров робота, определение и обработку сигналов датчиков, передачу данных и команд системам управления.
Более подробно о датчиках, используемых в робототехнике, мы будем говорить в отдельном параграфе данной лекции, сейчас же скажем лишь о некоторых сенсорах, используемых в роботах-манипуляторах.
Датчики положения, такие как энкодеры, и датчики скорости (тахометры 2Прибор, предназначенный для измерения частоты вращения (количество оборотов в единицу времени) таких деталей как роторы или валы в различных машинах и механизмах ) являются наиболее часто используемыми сенсорами в роботах-манипуляторах.
Энкодеры используются для измерения угла поворота шарниров робота. Они позволяют осуществлять позиционирование инструмента робота в пространстве и выполнять задачи с требуемой точностью. Тахометры измеряют скорость вращения или поступательного движения шарниров, обеспечивают возможность поддержания заданной скорости при выполнении задачи. Информация, полученная от энкодеров и тахометров, необходима для осуществления обратной связи для системы управления роботом, помогает определить текущее состояние робота и скорректировать движение для достижения требуемой позиции или скорости3О том, какие датчики используются в робототехнике, мы поговорим чуть подробнее в отдельном разделе в данной лекции . Контроллер может быть запрограммирован на выполнение определенных задач, он принимает сигналы от датчиков, координирует движения различных шарниров для достижения желаемого положения и ориентации концевого эффектора.
Контроллер получает программу выполнения определенной задачи. Программа может вводиться оператором с помощью управляющей панели, показанной на рис. 3.3. Контроллер также получает данные от различных датчиков и вычисляет позицию и скорость для каждого двигателя приводов. Таким образом контроллер робота инициирует движение отдельных компонентов манипулятора в нужной последовательности, сохраняет в памяти данные о положении и последовательности движения; обеспечивает взаимодействие робота с внешними предметами с помощью датчиков.
Роботы, показанные на рис. 3.1, 3.3, называются роботами с последовательным соединением звеньев. В таких роботах число степеней свободы совпадает с общим числом осей шарниров. Все шарниры должны приводиться в действие, и поэтому, как мы отметили на рис. 3.1, каждый шарнир содержит, как минимум, один сервопривод, который обеспечивает вращательные (или поступательные) движения с одной степенью свободы. На рис. 3.1 показан робот, имеющий только шарниры, позволяющие осуществлять вращательное движение, а на рис. 1.4 робот, имеющий как вращательные, так и поступательные.
Существует большое число вариаций шарнирных роботов, в том числе конструкции, в которых робот имеет не одну, а сразу несколько рук, что позволяет автоматизировать одновременно несколько операций.
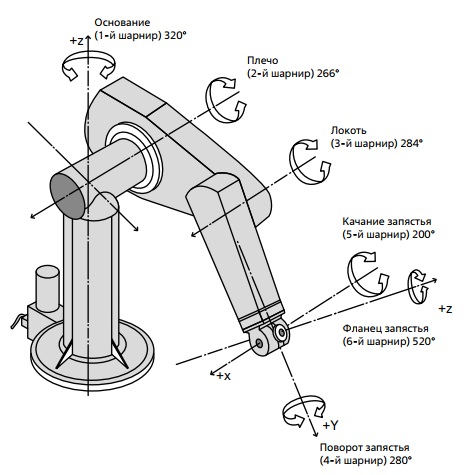
На рис. 3.4 представлена схема робота PUMA и приведены конкретные значения ограничений на поворот отдельных шарниров.
Источник: [ "Источники использованной литературы" , "Источники использованной литературы" ]
Плечо и локоть выполняют движения большой амплитуды, запястье - движения малой амплитуды. Инструмент (концевой эффектор) крепится к фланцу запястья (см. рис. 3.4).
Источники: [ "Источники использованной литературы" , "Источники использованной литературы" ]
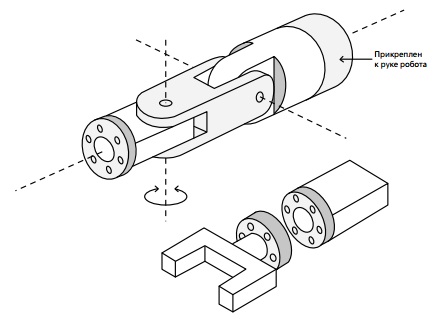
Концевой эффектор может представлять собой захват (на рис. 3.5 показана рама концевого эффектора), а также многие другие инструменты, такие как сверла, шлифовальные машины, лазеры и т. п.
Робот может иметь систему смены концевых эффекторов - модуль для быстрой ручной, а в большинстве случаев автоматической замены рабочего инструмента с использованием стандартного механического интерфейса. Процедура предусматривает, что все силовые и управляющие кабели, которые присоединяются к рабочему органу, должны быть при этом отключены и затем подключены заново.
Важными параметрами робота-манипулятора, помимо степеней свободы, о которых мы упомянули выше, является его грузоподъемность (полезная нагрузка), скорость и ускорение вращательного и поступательного движения его осей, точность позиционирования, радиус действия (также называемый дальностью робота), форма рабочей зоны (зоны действия).
Максимальный радиус действия, или дальность робота - это расстояние от центра системы координат робота до точки максимально- го удлинения механической руки.
Говоря о классификации по количеству степеней свободы, следует напомнить, что для того чтобы свободно манипулировать объектами в трехмерном пространстве, робот должен иметь шесть степеней свободы. Поэтому роботы общего назначения, как правило, имеют именно шесть степеней свободы (без учета концевого эффектора).
Роботы, имеющие более шести степеней свободы, называют роботами с избыточным числом степеней свободы. Последние типы роботов могут потребоваться, например, для того, чтобы осуществлять движения в обход препятствий.
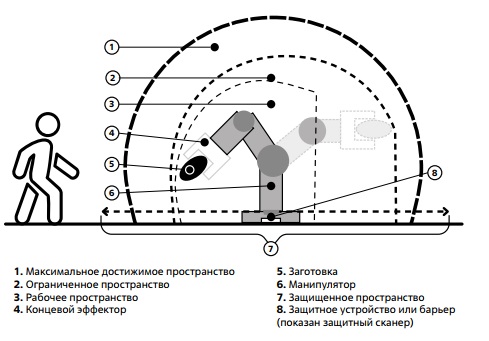
На рис. 3.6 показаны обозначения различных зон вокруг робота.
Источник: [ "Источники использованной литературы" , "Источники использованной литературы" ]
1 - максимально достижимое пространство; 2 - ограниченное пространство; 3 - рабочее пространство; 4 - концевой эффектор; 5 - заготовка; 6 - манипулятор; 7 - защищенное пространство; 8 - защитное устройство или барьер (показан защитный сканер)