Промышленные роботы. Путь от клетки к коботам
Максимально достижимое пространство (maximum space) включает все точки, которые могли бы потенциально занять элементы робота при отсутствии ограничений4Производители промышленных манипуляторов, приводя цифру дальности действия робота, говорят о дальности без учета рабочего инструмента. В то же время очевидно, что рабочий инструмент может, с одной стороны, из-за своего веса ограничивать дальность действия робота, с другой стороны, из-за своих размеров увеличивать ее. То же касается и рабочей зоны.
Ограниченное пространство (restricted space) - это часть максимального пространства, доступная с учетом ограничений. Немногие роботы перемещаются в пределах всего максимального пространства. На практике часть пространства недоступна для использования из-за ограничивающих устройств, таких как концевые выключатели, предохранительные ограничители осей и т. д.
Рабочее пространство (operating space) определяет все точки, которые посещает концевой эффектор робота при выполнении конкретной задачи (зависит от размеров концевого эффектора).
Редко когда роботы используют все ограниченное пространство робота в ходе выполнения отдельной задачи. Часть ограниченного пространства, которая используется в конкретной программе, называется рабочим пространством. Это ограничение связано не с вопросами безопасности, а с особенностями выполняемой задачи.
Защищенное пространство (safeguarded space) определяется физическими ограничениями в виде ограждений или лимитируется датчиками безопасности периметра, которые, например, включают сигнализацию.
Рабочая зона робота (working envelope) - это трехмерное простран- ство, к которому может дотянуться концевой эффектор при функционировании манипулятора. Рабочая зона манипулятора вне контекста конкретной операции соответствует понятию максимально достижимого пространства, при конкретной операции - ограниченному пространству (рис. 3.6). Рабочая зона зависит от конструкции и размеров манипулятора и от размеров концевого эффектора, в случае, когда говорят о роботе вне конкретной задачи, рабочую зону обозначают без концевого эффектора, как на рис 3.7, возможна также ситуация, когда речь идет о рабо- чей зоне с конкретным концевым эффектором (например, см. рис. 3.9). На рис. 3.7 схематично показана рабочая зона шарнирного робота-манипулятора в двух проекциях - сбоку и сверху. Здесь представлен робот с тремя степенями свободы - вращательными осями, обозначенными соответствующими углами поворота, q1, q2, q3.
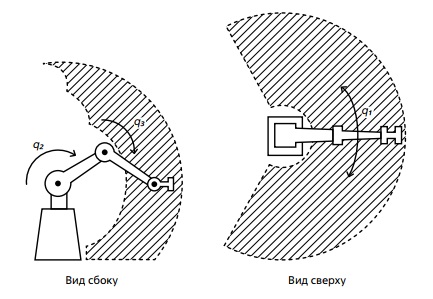
Рис. 3.7. Рабочая зона шарнирного робота. Источник: Джон Крейг "Введение в робототехнику", издание 2004 г.
Шарнирные роботы обеспечивают высокую экономичность и точность и имеют множество применений, включая перемещение объектов, сборочные операции, упаковку, сварку, покраску, обработку материалов и т. п.
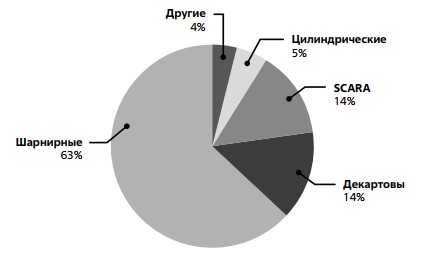
Мы рассмотрели наиболее распространенную конструкцию промышленного робота - шарнирный манипулятор, на который, согласно данным IFR, приходится около 60% установок промышленных роботов по всему миру.
Классификация промышленных роботов по типу конструкции
Выше мы рассмотрели роботы с шарнирными сочленениями. IFR классифицирует промышленные роботы по их механической структуре и определяет пять типов стационарных промышленных роботов: шарнирные, картезианские (декартовы), SCARA, цилиндрические и параллельные роботы (рис. 3.8).
Источник: [ "Источники использованной литературы" ]
Рассмотрим кинематические схемы промышленных роботов, перечисленных на рис. 3.8.
Декартовы роботы
Декартовы (картезианские, прямоугольные или линейные) роботы получили свое название потому, что работают в декартовой системе координат (X, Y и Z). То есть это робот с тремя взаимно перпендикулярными осями управления, расположенными подобно осям 3D принтера. Три скользящих шарнира5Могут использоваться также винтовые передачи позволяют перемещать концевой эффектор вдоль указанных осей (см. рис. 3.9).
Такая конфигурация обеспечивает роботу высокую точность и способность поднимать достаточно тяжелые грузы.
Рабочая зона декартовой конфигурации представляет собой прямоугольную призму. В рабочей зоне нет мертвых зон, и робот может манипулировать максимальной полезной нагрузкой по всему рабочему объему.
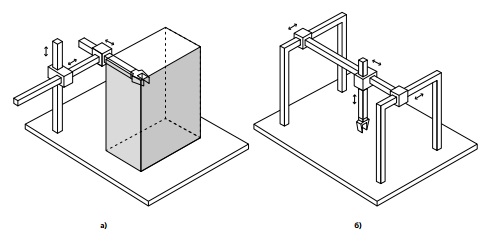
Рис. 3.9. Принципиальная схема декартова робота с обозначением рабочей зоны (а) и портальная схема декартова робота (б).
Источник: [ "Источники использованной литературы" ]
Декартовы роботы часто используются для перемещения материалов, 3D-печати, упаковки, сверления. Это высокопроизводительный и точный роботизированный манипулятор, который хорошо подходит для промышленных задач, требующих линейных перемещений, в том числе тяжелых объектов.
Недостатком данной конструкции является то, что прямолинейные движения манипулятора могут затруднить выполнение задач, требующих более сложных движений, таких как вращение или наклон.
Декартовы роботы, у которых горизонтальная часть поддерживается с обеих сторон, также называют портальными роботами (рис. 3.9 (б)). Рабочая зона портального робота такая же, как и у других роботов картезианского типа, однако портальный робот обычно ограждает свою рабочую зону снаружи. Эти роботы часто имеют большие размеры и используются как подъемно-транспортные средства.
Цилиндрические роботы
Роботы-манипуляторы с цилиндрической конфигурацией появились на заре развития промышленной робототехники. Согласно [ "Источники использованной литературы" ], первый цилиндрический робот был установлен в 1962 г. Типичный цилиндрический робот имеет два призматических (поступательных) шарнира6Призматический, или выдвижной шарнир - это сочленение двух звеньев, обеспечивающих линейное перемещение одного звена относительно другого (рис. 3.10) и один поворотный шарнир для позиционирования концевого эффектора, что обеспечивает цилиндрическое рабочее пространство (3.10 (б)).
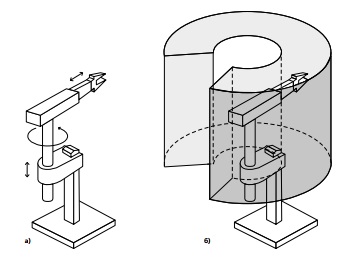
Рабочая зона у робота рассматриваемой конфигурации, как следует из названия, представляет собой полый цилиндр, поскольку существует ограничение на втягивание инструмента манипулятора, что создает цилиндрическую мертвую зону вокруг конструкции робота.
Еще раз напомним, что в отличие от рис. 3.7, на рис 3.9, 3.10 показаны рабочие зоны роботов с учетом концевых эффекторов.
Цилиндрические роботы обычно используются в таких областях как загрузка и выгрузка оборудования, сборка, нанесение покрытий, транспортировка, литье под давлением.
Среди преимуществ цилиндрических роботов - простота установки и эксплуатации, малая занимаемая площадь, способность переносить достаточно тяжелые и большие грузы.
К их недостаткам можно отнести низкую точность и неспособность обходить препятствия.
Согласно данным [ "Источники использованной литературы" ], доля цилиндрических роботов сокращается, и авторы публикации прогнозируют, что данная конфигурация будет вытесняться роботами SCARA, которые могут выполнять аналогичные задачи с более высокой скоростью и производительностью.
SCARA-роботы
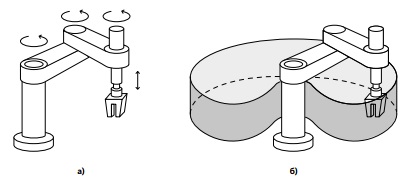
SCARA (аббревиатура от Selective Compliance Articulated Robot Arm) - это роботы с двумя параллельными поворотными шарнирами. Два горизонтальных звена робота вращаются вокруг вертикальных осей, а последнее звено с концевым эффектором осуществляет вертикальное поступательное перемещение (рис. 3.11(а)). Конструкция, состоящая из двух звеньев, может вытянуться, распрямив "локоть", а может свернуться, освободив занимаемое пространство.
Форму рабочей зоны иллюстрирует рис. 3.11 (б). Рабочая зона охватывает большую площадь в горизонтальной плоскости и относительно небольшую в вертикальной плоскости.
Манипуляторы конфигурации SCARA были разработаны в Японии учеными университета Яманаси и впервые появились в 1981 г.
SCARA можно перевести как "шарнирно-сочлененный манипулятор с избирательной податливостью". Выражение "избирательная податливость" означает способность манипулятора быть податливым в горизонтальной плоскости, сохраняя при этом жесткость в вертикальной плоскости. Избирательная податливость полезна при сборке, например, когда деталь необходимо вставить в печатную плату (установить деталь в отверстие). Для центрирования детали перед вставкой в отверстие часто требуется небольшое смещение, после которого осуществляется движение вниз для вставки. Последняя операция требует определенной жесткости, которая не обеспечивается при использовании других типов роботизированных рук.
Для SCARA роботов характерна неоднородность разрешающей способности в горизонтальной плоскости. Максимальная точность (наименьшая абсолютная погрешность и наибольшая разрешающая способность) наблюдается в центре механизма и по мере удаления от центра (с выпрямлением "руки" SCARA-манипулятора), разрешающая способность ухудшается.
Роботы SCARA произвели революцию в производстве электроники благодаря своей избирательной жесткости, простоте, низкой стоимости, высокой степени точности и повторяемости. Они занимают небольшую площадь и обычно используются в тех случаях, когда перемещаемые объекты находятся на относительно небольшом расстоянии. SCARA-роботы имеют меньше степеней свободы и менее дороги, чем шарнирные манипуляторы. По сравнению с декартовыми роботами SCARA менее жесткие и грузоподъемные.
Дельта-роботы
Дельта-роботы относятся к типу параллельных роботов. Прежде чем перейти к этих описанию роботов, напомним разницу между последовательной и параллельной архитектурой промышленных роботов.
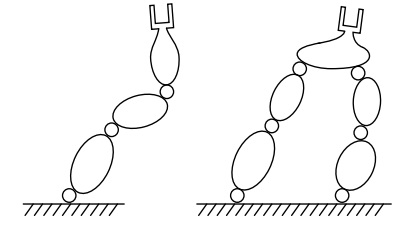
Последовательные роботы имеют разомкнутую последовательную цепочку звеньев, а параллельные роботы имеют замкнутую кинематическую цепочку, как показано на рис. 3.12.
В параллельных роботах число степеней свободы меньше, чем общее число степеней свободы в шарнирах, поэтому часть шарниров являются пассивными (не содержат двигателей).