Эволюция роботов
В 1938 г. был создан первый программируемый механизм - краскораспылитель. В середине 1940-х годов появились первые ЭВМ на базе электронных ламп. В это же время зарождается кибернетика - междисциплинарная область исследования, объединяющая системы управления, теории электрических цепей, машиностроение, логическое моделирование, эволюционную биологию, неврологию. Данное научное направление имело большое значение для развития систем автоматизации, теории систем, систем с обратной связью и непосредственно робототехники как их практической реализации.
В 1947 г. был собран первый работоспособный транзистор.
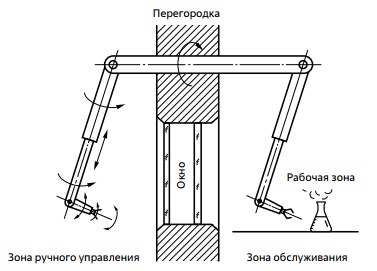
В рамках развития атомного проекта в 1940-х годах потребовалась удаленная работа с радиоактивными материалами, что привело к появлению механических манипуляторов с удаленным ручным управлением. Ряд исследователей в качестве отправной точки появления современных роботов называют именно манипуляторы дистанционного управления, зародившиеся в атомной промышленности. Принципиальная схема механического манипулятора "ведущий - ведомый" представлена на рис. 2.5.
Источник: [ "Источники использованной литературы" ]
Здесь опасная (рабочая) зона отделена от оператора замкнутой камерой, в которой может быть неприемлемая для человека среда (температура, давление, радиоактивность и т. п.). Перегородка защищает оператора, находящегося на стороне устройства с ручным управлением, от вредного воздействия среды рабочей зоны. Оператор может видеть объект, над которым необходимо выполнять определенные манипуляции, через специальное стекло.
В 1949 г. Раймонд Гертц подал заявку на патент на телеуправляемый шарнирный манипулятор от имени Комиссии по атомной энергии США. Развитие ядерной промышленности и ее приложений привело к распространению устройств такого рода.
На рис. 2.4 мы схематично изобразили динамику появления роботов разного типа и динамику интереса к робототехнике со стороны профессионального сообщества на разных периодах эволюции роботов. На рис. 2.6 мы представили те же временные периоды и со- ответствующие этим периодам ключевые технологические новации, оказавшие важнейшее влияние на развитие робототехники.
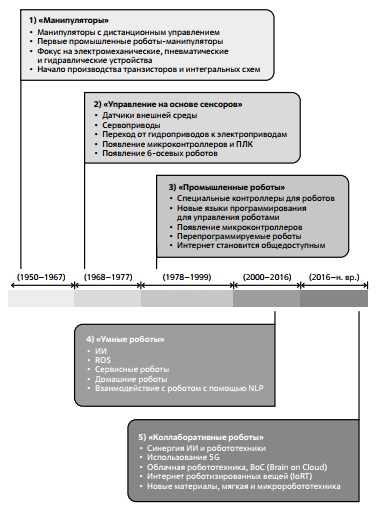
Рис. 2.6. Ключевые периоды развития робототехники и важнейшие технологические события, определившие данные этапы
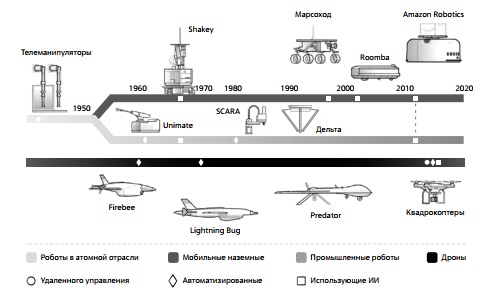
На рис. 2.4, 2.6 мы представили эволюцию роботов как одномерный процесс. Однако ветвей эволюции множество. Рис. 2.7 иллюстрирует тот же временной процесс, но в виде нескольких параллельных ветвей.
Конечно, указанными на рисунке тремя направлениями не исчерпывается множество траекторий эволюции роботов, но здесь уже можно проследить, как во времени роботы осваивали разные ниши.
По материалам [ "Источники использованной литературы" ]
Мы представили различную графическую интерпретацию эволюции роботов на промежутке 1950-2020 гг., отражающую пять поколений роботов, и теперь, опираясь на рис. 2.4, 2.6 и 2.7, рассмотрим указанные периоды чуть более подробно.
Первый этап (1950-1967) - это этап появления первых роботов. Несмотря на то что робототехника в эти годы находилась в зачаточном состоянии, на данном этапе решались фундаментальные вопросы проектирования нового класса машин. Современных электронных компонентов и компьютерных технологий для разработки роботов еще не было. Этот инструментарий и сама электронная элементная база создавались параллельно. Пятидесятые годы - это период, когда серийное производство транзисторов - ключевых компонентов электроники, которые послужили основой создания процессоров, микроконтроллеров, других микросхем, только началось.
В 1955 г. появился первый транзисторный компьютер. В конце 1950-х годов происходит переход от отдельных транзисторов к интегральным схемам - множеству транзисторов на одной пластинке полупроводника. В 1959 году начался промышленный выпуск кремниевых интегральных схем, что означало начало вступления в эпоху микроэлектроники.
Как мы отметили, в этот период происходит развитие телеманипуляторов - устройств, в которых ручное управление манипулятором осуществляется на расстоянии (удаленно), - на первых моделях механически и позднее с использованием проводного и беспроводного соединения4Более подробно об эволюции телеманипуляторов будет рассказано в данной лекции
В 1950-х годах появляются первые манипуляторы с числовым управлением для механической обработки с возможностью хранения в памяти серии запрограммированных команд.
В 1952 г. в Массачусетском технологическом институте был разработан первый станок с ЧПУ (фрезерный станок с числовым программным управлением для малых партий), патент на этот станок был выдан в 1958 г.
Несмотря на описанные прототипы, в большинстве источников началом промышленных роботов называют 1954 год, когда Джон Девол подал заявку на патент5Патент выдан в 1963 г на метод, который был реализован в создании промышленного робота Unimate. В 1961 г. Джон Девол и Джозеф Энгельбергер основали компанию Unimaton, которая произвела первый промышленный робот Unimate, манипулятор с гидравлическим приводом (робот показан среди прочих на рис. 2.7). Манипулятор весил две тонны и управлялся программой, записанной на магнитном барабане.
Unimate содержал контур обратной связи по положению 6Контур обратной связи по положению относится к системе управления, где измеряемое положение робота сравнивается с целевым, и на основе этого сравнения контроллер робота принимает действия по коррекции движения робота, чтобы компенсировать ошибки, возникающие из-за внешних воздействий и других факторов, в котором перемещения звеньев манипулятора измерялись установленными в них датчиками.
Первый Unimate был установлен на заводе General Motors для извлечения деталей из литейной машины. Последующие версии Unimate использовались для перемещения заготовок и для точечной сварки кузовов автомобилей.
В последующие годы был создан целый ряд компаний по производству манипуляторов, в первую очередь для автомобильной промышленности.
В Европе первые промышленные роботы появились в 1967 г. Роботы первого поколения представляли собой программируемые машины с ограниченной функциональностью, не имеющие датчиков для связи с внешней средой.
Первые контроллеры для управления промышленными роботами, основанные на электромеханических реле, были довольно громоздкими и сложными в обслуживании.
Промышленные роботы первого поколения практически не воспринимали окружающую среду, поэтому для выполнения повторяющихся задач опирались на обучение по путевым точкам. Программирование роботов осуществлялось путем обучения двигаться "от точки к точке", то есть от одной точки с заданными координатами к другой.
Конечно, промышленные роботы являются центральным элементом обсуждаемого этапа. Однако одновременно велись работы по созданию беспилотных наземных и воздушных аппаратов. В пятидесятые годы развиваются первые БПЛА 7В последнее время воздушные беспилотники называют разными терминами: БПЛА (беспилотные летательные аппараты), БЛА (беспилотные летательные аппараты), БАС (беспилотные авиационные системы), БВС (беспилотные воздушные суда). (см. рис. 2.7), которые к роботам не имели прямого отношения, но которые можно считать прообразами современных умных дронов, которые все чаще именуются как "летающие роботы".
В частности, в начале 1950-х в США был построен беспилотный летательный аппарат с реактивным двигателем Ryan Firebee, который использовался в качестве беспилотных мишеней 8Первые беспилотные самолеты проектировались в США и СССР еще раньше (в 1930-1940 годах), например в ленинградском НИМТИ разрабатывался "планер специального назначения" ПСН-1 и ПСН-2, который мог нести одну торпеду, запускался с самолета-носителя (тяжелый бомбардировщик ТБ-3) и садился на воду. Наведение планера производилось по инфракрасному лучу.. Позднее были выпущены разведывательные ударные и многоцелевые модификации.
Второй этап (1968-1977). На этом этапе промышленные роботы получают развитие и используются прежде всего в автомобильной промышленности для выполнения рутинных задач в изолированной среде. Это были программируемые машины с минимальными возможностями распознавания внешней среды и ограниченными возможностями самоадаптивного поведения.