Роботы в атомной промышленности
Источник: IRID [ "Источники использованной литературы" ]
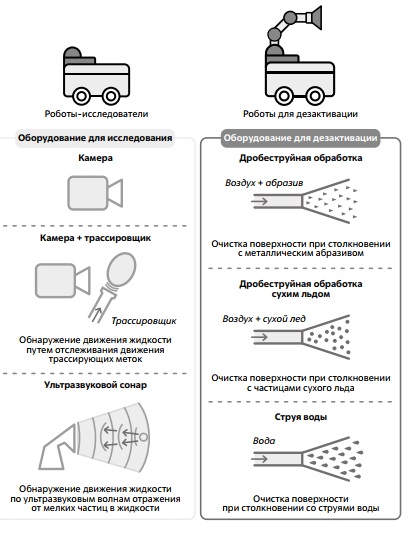
На рис. 10.5 (слева) показаны отдельные примеры оборудования, используемого роботами для исследования, в частности это видео- камера с трассировщиком, который позволяет отслеживать движения жидкости за счет использования трассирующих меток. При этом очевидно, что роботы для исследования используют широкий арсенал датчиков, не упомянутых на рисунке (замер уровня радиации, температуры, давления, влажности и т. п.). На рис. 10.5 (справа) показаны некоторые приспособления, которые применяют дезактивационные роботы (дробеструйная обработка металлическим абразивом, сухим льдом или водой). Отметим, что обычно роботы для выполнения дезактивации имеют устройства для выполнения механических работ в дополнение к наблюдательным и навигационным.
Источник: "Источники использованной литературы"
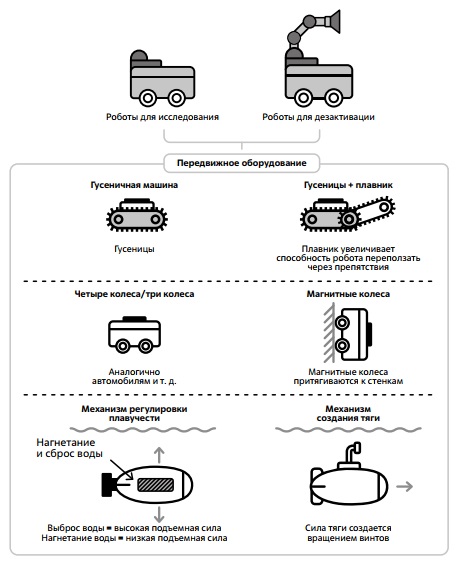
Рассмотрим несколько примеров роботов разного типа на примере аппаратов, применяемых для ликвидации аварии на "Фукусиме".
Примеры исследовательских роботов
Исследовательские (инспекционные) роботы служат для получения данных о состоянии объектов в зонах, в которые не может проникнуть человек, они собирают информацию об уровне радиации, температуре, давлении, доставляют визуальные изображения о со- стоянии повреждений, обнаруживают протечки и т. п.
PMORPH. Мини-робот, представленный компанией Hitachi-GE Nuclear Energy в 2015 г., способен менять форму для проникновения в труднодоступные места. Робот использовался для обследований нижней части контейнмента 3Гермооболочка, которая представляет собой массивное сооружение, в котором располагается основное оборудование реакторной установки аварийного блока № 1 АЭС "Фукусима 1". Вес аппарата составляет менее 8 кг при диаметре около 10 см. Робот состоит из трех звеньев, которые могут поворачиваться относительно друг друга. Устройство предназначено для визуальной и дозиметрической разведки, измерения температуры в условиях высокой радиации.
Tri-Diver. Робот на гусеничном ходу, представленный компанией Hitachi-GE Nuclear Energy в 2014 г., предназначен для выявления протечек, которые трудно обнаружить оптическими средствами. Робот может работать под водой (устойчивость к давлению воды до 10 м). Вес аппарата приблизительно 40 кг на воздухе и около 1,5 кг в воде. Длина устройства 60 см при высоте 40 см. Машина оснащена оборудованием для исследований (камера, ультразвуковой сонар, датчик температуры воды).
Gengo ROV. Подводный плавающий робот, представленный компанией Hitachi-GE Nuclear Energy в 2014 г., служит для исследования поверхности стен, в том числе под водой - робот может погружаться на глубину до 10 м. Устройство имеет рулевой механизм и механизм регулировки плавучести. Исследовательское оборудование включает камеру и измеритель температуры воды. Длина около полуметра, вес - приблизительно 22 кг (на воздухе).
Мобильный робот с магнитным притяжением. Небольшой робот длиной менее 30 см и весом около 10 кг, разработанный компанией Toshiba Energy Systems & Solutions в 2014 г.
Робот оснащен магнитными ведущими колесами, он прикрепляется к внешней поверхности вентиляционной трубы и перемещается к месту инспекции стыка для обнаружения утечек с помощью камеры с подсветкой.
Помимо перечисленных выше роботов для осмотра, радиационных замеров и взятия проб использовались роботы PackBot и Warrior (от iRobot), Talon и DR-20 (от QinetiQ), T-Hawk (Honeywell), Survey Runner (Topy Industries) и другие.
Примеры дезактивационных роботов
Это роботы для уборки, разбора конструкций и дезактивации, приспособленные к очистке поверхностей на разном уровне от пола до многометровой высоты. Приведем лишь несколько примеров.
Дезактивационный робот "Супер-жираф" Super-Giraffe. Робот для дезактивации высоких конструкций с помощью дробеструй- ной обработки. Разработан Mitsubishi Heavy Industries в 2015 г. Использовался для обработки на первом этаже реакторного здания. Мобильность платформы обеспечивается полноприводным четырехколесным шасси. Навесное оборудование представляет собой руку, снабженную дробеметом и пылесборником. Длина платформы 2,3 м, высота 1,7 м, максимальная высота подъема оборудования - 8 м, вес машины приблизительно 4 тонны. Робот может функционировать также в режиме подъемного крана, поднимая на восьмиметровую высоту грузы до 150 кг.
Робот для снятия экранирующих пластин (TEMBO). Создан компанией Mitsubishi Heavy Industries в 2015 г. Машина высотой около двух метров и весом 3,5 тонны, предназначена для работ на первом этаже реакторного здания на втором энергоблоке АЭС "Фукусима" и приспособлена для снятия экранирующих металлических пластин. Мобильность робота обеспечивается трехколесным шасси.
Поезд из роботов, осуществляющих 4 вида обработки. Разработка Mitsubishi Heavy Industries, Ltd., Hitachi-GE Nuclear Energy и Toshiba Energy Systems & Solutions Corporation, продемонстрированная в 2015 г.
Решение представляет собой серию мобильных гусеничных платформ, которые осуществляют дезактивацию с использованием четырех технологий: дробеструйной обработки, обработки струей сухого льда, струей воды высокого давления, а также всасывания отходов. Роботы использовались для дезактивации поверхности пола и стен нижней зоны на втором и третьем этажах здания реактора на блоке 1-3. Вес платформ составлял 550, 680 и 750 кг при длине около двух метров каждая [ "Источники использованной литературы" ].
Дезактивационный робот Arounder. Робот, разработанный компанией Hitachi-GE Nuclear Energy в 2014 г., для дезактивации струей воды высокого давления. Применялся для дезактивации струей воды для очистки пола и стен на первом этаже здания реактора на блоке 1-3. Оборудование включает насос, головку, которая имеет сопло с водяной струей высокого давления, гидравлическую телескопическую мачту, поднимающую сопловую головку, и гусеничное транспортное средство, которое их перевозит. Длина машины 1,6 м, вес приблизительно 850 кг. Гусеничная машина оснащена четырьмя опорами для поддержания устойчивости основного корпуса во время выброса воды под высоким давлением и четырьмя ластами для управления поворотом в направлении наклона при преодолении неровностей или склонов. Робот оснащен одиннадцатью камерами для наблюдения за окружающей обстановкой и всасывающей головкой, которая собирает стекающую загрязненную воду [ "Источники использованной литературы" ].
Робот MEISTeR. Данный робот, представленный компанией Mitsubishi Heavy Industries в 2013 г., можно отнести к устройствам комплексного применения. Это сравнительно небольшой робот на гусеничном ходу длиной 1,2 м, шириной 0,7 м и высотой 1,3 м, весом приблизительно 500 кг. На "Фукусиме" применялся для очистки пола и нижней части поверхности стен на первом этаже здания реактора на блоке 1-3.
Робот может производить как разведку, так и механические работы, а именно дезактивацию горизонтальных и вертикальных поверхностей, резку металлических конструкций, взятие проб из бетонных поверхностей и т. д.
К уборке и дезактивации в помещениях станции привлекались также машины Warrior (iRobot), Revi (Toshiba), Raccoon (Atox), DX 140 (Husqvarna) и др.
Для расчистки завалов, демонтажа конструкций на площадке применялись роботы ASTACO-SoRa (от Hitachi), Brokk 90 и Brokk 330 (одноименной шведской фирмы), Spartacus/Bobcat (совместные изделия компаний Bobcat и QinetiQ), другие дистанционно управляемые экскаваторы, бульдозеры и погрузчики.
Основные выводы, которые публикуют японские ученые, подводя некоторый промежуточный этап анализа эффективности роботов, применяемых на "Фукусиме", и опыта их разработки, в самом общем плане сводятся к трем тезисам. Обеспечение радиационной стойкости является ключевой проблемой для роботов, функционирующих в условиях выводимых из эксплуатации аварийных объектов.
Сложность дистанционного управления, процесса обучения команд операторов, выполняющих дистанционное управление, растет по мере роста габаритов и веса аппаратов.
При проектировании роботов, функционирующих в условиях работы с аварийными ядерными объектами, важно найти баланс надежности, многофункциональности и производительности аппарата.
Как было отмечено выше, создание экстремальной робототехники в существенной мере стимулировалось конкретными происшествиями на ядерных объектах. Но и в условиях отсутствия крупных аварий ученые и инженеры продолжают работу над созданием новых роботизированных устройств, способных работать в аварийных зонах на атомных объектах. Например, в 2023 г. по заказу Госкорпорации "Росатом" силами специального конструкторско-технологического бюро прикладной робототехники был спроектирован и изготовлен робот-амфибия (дистанционного беспроводного или кабельного исполнения) для работы в экстремальных ситуациях. Аппарат позволяет проводить визуальную разведку на суше и под водой, захватывать и перемещать предметы массой до 25 кг. Робот может погружаться под воду на глубину до 3,5 м [ "Источники использованной литературы" ].
Говоря о создании самоходных робототехнических комплексов для работы на радиационно опасных производствах, необходимо упомянуть еще одно подразделение Госкорпорации "Росатом" - Федеральное государственное унитарное предприятие "Всероссийский научно-исследовательский институт автоматики им. Н.Л. Духова" (ФГУП "ВНИИА"), созданное в 1954 г. Это предприятие является од- ной из ведущих научно-исследовательских организаций корпорации "Росатом". В институте сформировано отделение робототехнических систем. Основная задача отделения - разработка самоходных управляемых аппаратов, оборудованных роботизированными манипуляторами, для использования при ликвидации последствий техногенных аварий на ядерных объектах.
В России также были созданы роботы, которые принимали уча- стие в проведении дезактивационных работ на ежегодных учениях. В частности, робот МРК 27 разработки " СКТБ ПР 4Специальное конструкторско-технологическом бюро робототехники ("СКТБ ПР")" (гусеничная машина с манипулятором, которая может осуществлять очистку поверхности водой под большим давлением) применяется на ряде предприятий Госкорпорации "Росатом".
Роботы для обеспечения физической и пожарной безопасности
Продолжая тему безопасности атомных электростанций, необходимо сказать о такой задаче как физическая защита территории АЭС с помощью роботов.
Ядерные объекты могут быть целью для разного рода атак, включая террористические. Необходим мониторинг охраняемой зоны, который может быть успешно осуществлен как с помощью БПЛА, так и с помощью наземных мобильных роботов.
С помощью летающих беспилотников можно получить эффективное круглосуточное всепогодное наблюдение. В качестве БПЛА перспективно использовать мультироторные или гибридные беспилотники (например, отечественный аппарат среднего радиуса действия марки ZALA), которые позволяют осуществлять поиск и обнаружение объектов, вести распознавание лиц и государственных номеров автомобилей.
Для целей наблюдения охраняемой территории могут применяться не только летающие, но также и мобильные наземные роботы. В качестве примера можно привести машины, используемые для обеспечения безопасности периметра критически важных объектов инфра- структуры, включая ядерные объекты, от компании SMP Robotics, которая считается одним из лидеров по созданию охранных роботов. Охрана внешнего периметра критически важных объектов обычно имеет две линии ограждений. Первая линия выставляется вокруг всей территории охраняемого объекта, для того чтобы предотвратить проникновение на эту территорию случайных нарушителей. Второе ограждение устанавливается ближе к самому объекту.
SMP Robotics предлагает целую серию роботов, которые могут совместно вести охрану критически важных объектов. Робот S5 PTZ5PTZ-камера (pan-tilt-zoom) - позволяет управлять положением и углом обзора камеры благодаря специальной системе приводов поворота, наклона и приближе- ния. "Pan" означает поворот камеры в горизонтальной плоскости, "tilt"- наклон в вер- тикальной плоскости, а "zoom" - увеличение или уменьшение изображения (S5 PTZ Security Robot) предназначен для наблюдения за территорией между первой и второй линиями. Он ведет наблюдение и в случае обнаружения движения направляет свою PTZ-камеру на движущийся объект, приближает его и передает изображение на центральную станцию мониторинга. Модель S5 PTZ Solar Robot оснащена солнечными батареями, рассчитанными на длительную работу без подзарядки.
Другая модель робота "S5 Perimeter Control Robot" предназначена для контроля периметра. Эти роботы патрулируют внутреннюю сторону второго забора. Задача этих роботов - постоянно двигаться вдоль заграждения и контролировать территорию на среднем расстоянии, не давая злоумышленнику шанса проникнуть за забор и обойти датчики вторжения. Если датчики активируются, робот отклоняется от своего маршрута и направляется к предполагаемому месту вторжения.
Робот "S5 HD restricted-area patrolling robot" предназначен для патрулирования самой охраняемой территории, а не ее периметра. Назначение данной модели - следить за злоумышленниками, которые могут спрятаться, проникнув на объект иными способами, чем преодоление ограждения по периметру. Например, S5 HD может идентифицировать (на основе автоматического распознавания номерных знаков) и осматривать транспортные средства, въезжающие в охраняемую зону. Осуществляя патрулирование в ночное время, робот может обнаружить людей, которые не участвуют в обслуживании охраняемого объекта. Благодаря способности перемещаться без спутниковых сигналов робот S5 HD может вести мобильное наблюдение внутри больших помещений или на крытых территориях [ "Источники использованной литературы" ].
Важным направлением безопасности на АЭС является обеспечение противопожарной безопасности.
Противопожарные технические средства можно разделить на стационарные и мобильные. Роботы обеих категорий должны работать в условиях радиации и выделения химических элементов.
Говоря о мобильных установках пожаротушения, следует назвать устройства от компании "СКТБ ПР". В частности, в 2023 г. в этой компании были разработаны и в 2024 г. поставлены на Калининскую и Нововоронежскую атомные станции малые мобильные роботизированные установки пожаротушения (МРК-29 МРУП). Эти установки первые в России получили декларацию на соответствие требованиям безопасности пожаротушения. Управление установками осуществляется по кабелю (300 м) и по радио (до 1 километра), вес аппарата 270 кг. Устройства оснащены приборами радиационной разведки, тепловизором и газоанализатором.
Говоря о стационарных установках пожаротушения, следует упомянуть устройства от компании " ЭФЭР6это отечественная компания из Петрозаводска - производитель роботизированных систем пожаротушения и ствольной пожарной техники, продукция компании защищает объекты Росатома, Газпрома, Роскосмоса " - это дистанционно управляемые лафеты с тепловизорами и телекамерами для дистанционного управления. Эти робототехнические устройства поставлены на ряд российских атомных станций.