Среднесрочные прогнозы развития робототехники, технико-экономический анализ
Интерактивный интерфейс робота (Robot interactive interface) - это система, которая позволяет человеку общаться с роботами с помощью естественного языка, жестов и других интерактивных методов. Система состоит из аппаратных и программных компонентов, которые позволяют человеку отдавать команды или запросы роботу, используя речь, текст, прикосновения или движения. Интерфейс может включать экран, микрофон, динамик и различные датчики для сбора информации и обратной связи. Технология повышает эффективность совместной работы человека и робота за счет улучшения коммуникации между людьми и роботами. В 2020 г. прогноз состоял в том, что технология выйдет на плато продуктивности в течение 5-10 лет.
Микротопливный элемент (Micro Fuel Cell) - микротопливный элемент преобразует химическую энергию топлива, такого как водород или метанол, в электрическую. В отличие от аккумуляторов, которые требуют подзарядки, топливные элементы производят электричество постоянно, при условии, что есть постоянный запас топлива. Термином "микротопливный элемент" обычно обозначают небольшие системы топливных элементов, обеспечивающие мощность менее 50 Вт.
В 2020 г. Gartner расположила технологию на этапе "подъем осведомленности" и прогнозировала выход на плато в течение 5-10 лет.
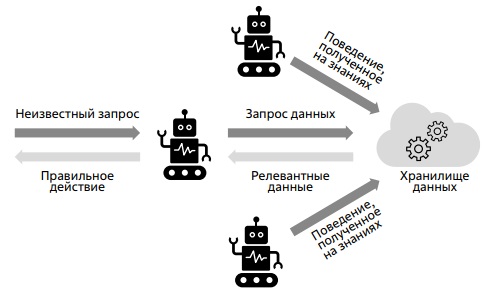
Обмен знаниями между роботами (Robot Knowledge Sharing) - это процесс передачи информации, знаний и опыта между роботами (и между роботами и людьми), который позволяет ускорить процесс обучения роботов и повысить их эффективность в выполнении различного рода задач. Цель состоит в том, чтобы создать сообщество роботов, способных учиться друг у друга и развивать свои способности с течением времени, как это делают люди (см. рис. 15.9).
Технология может включать обмен данными о физической среде, о конкретных задачах или о том, как взаимодействовать с людьми. Обмен знаниями между роботами является одним из методов решения задач коллективного взаимодействия роботов. Выработанная в одном роботе карта окружающей среды, дополненная знаниями о передвижении и действиях, может быть передана другому роботу, что существенно ускорит его работу.
Источник: [ "Источники использованной литературы" ]
Компания Gartner описывает обмен знаниями как способность роботов (даже с разными функциями) обмениваться знаниями, приобретенными навыками и ходом выполнения задач с другими роботами в сети, что позволяет совместно работать над задачей. Ожидается, что такой тип обмена знаниями будет становиться все более важным, поскольку количество роботов, функционирующих вместе в гетерогенной среде, продолжает расти. В 2020 г. Gartner оценивала перспективы выхода технологии на плато продуктивности с горизонтом более 10 лет, а в 2021 г. - со сроком в 6-8 лет.
БПЛА легче воздуха для поддержания коммуникационных платформ (Lighter-than-air communications platforms). Речь идет про использование БПЛА легче воздуха для подъема платформы, которая может нести коммуникационное оборудование для обеспечения беспроводной связи на большой территории. Платформа оснащена коммуникационным оборудованием, камерами и другими датчиками для обеспечения возможности управления системой и поддержания беспроводной связи. Коммуникационные платформы данного типа предназначены для длительного нахождения в воздухе, они могут использоваться в ситуациях реагирования на стихийные бедствия или, например, в военных операциях. В 2023 г. планировалось, что технология выйдет на стадию продуктивности через 5-10 лет.
Мультиагентные оркестровочные платформы (Multiagent Orchestration Platforms) действуют как интеллектуальное промежуточное программное обеспечение, которое интегрирует и организует работу между различными бизнес-приложениями, гетерогенными парками роботов и другими агентами (автоматизированные двери или лифты), в стенах склада или распределительного центра. По мере роста парка роботов компаниям требуются возможности оркестровки, которые позволяют распределять работу между нужными роботами на основе информации, поступающей практически в режиме реального времени. Эти задачи решает платформа, которая помогает интегрировать и организовать работу, поручаемую разнородному парку роботов. Согласно отчету Gartner от 2023 г., к 2026 г. более 50% компаний, внедряющих роботов для интралогистики на складах, будут иметь мультиагентную платформу оркестровки. В 2023 г. предполагалось, что технология выйдет на стадию продуктивности в течение 5-10 лет.
Мобильные роботы-сортировщики (mobile sortation robots) перемещают заказы в роботизированных логистических системах, в которых много пунктов отгрузки и много пунктов приема. Эти роботы используют автономную навигацию на базе использования камер или лидаров для перемещения по объекту и оптимизации маршрутов. Мобильные роботы-сортировщики могут быть дополнительно оснащены роботизированными руками, которые могут захватывать предметы в процессе сортировки. Согласно циклу ажиотажа (рис. 15.8), эта технология в 2023 г. была на пике завышенных ожиданий и выйдет на плато продуктивности в течение 5-10 лет, хотя уже сейчас можно встретить ряд крупных стартапов в этой сфере.