Роботы: толкование термина, эволюция и классификация
Типичные применения промышленных роботов - это погрузочно-разгрузочные работы, сварка, пайка и т. п.
Сервисные роботы делятся на профессиональные - те, которые требуют обслуживания специально обученным персоналом (например, в медицине и транспорте), и потребительские, которые не требуют специального обучения для использования (например, роботы-пылесосы).
IFR дает четкое определение промышленных роботов, в основном следуя трактовке ISO. Промышленный робот - это "автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем или более осям. Он может быть как стационарным, так и имеющим возможность передвижения для использования в приложениях промышленной автоматизации" [ "Источники использованной литературы" ].
Однозначно определяются все из перечисленных признаков.
Это манипулятор - машина для захвата и перемещения объектов 41Концевой эффектор не является частью манипулятора и может выбираться по назначению (рис. 1.18).

Манипулятор является многоцелевым, то есть может быть приспособлен к другому применению с физическими изменениями, например, при смене концевых эффекторов.
Автоматическое управление означает, что управление осуществляется в соответствии с программой задания (набором инструкций, которые определяют конкретную задачу), а не вручную, например, с помощью джойстика.
Программируемый по трем или более осям. Данная характеристика определяет физическую достижимость концевым эффектором любой точки в трехмерном пространстве. На рис. 1.18 показан шарнирный робот, в котором звенья последовательно соединены шарнирами. Данный робот имеет четыре вращательных оси, то есть более трех программируемых осей 42Более подробно промышленные роботы с различными кинематическими схемами будут рассмотрены далее в этой лекции .
Перепрограммируемый, то есть разработан так, что запрограммированные движения или вспомогательные функции могут быть из менены без изменения механической системы.
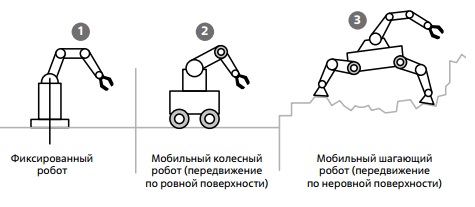
Фиксированный на месте или мобильный: робот может быть закреплен на стационарной или мобильной платформе.
Как мы уже отметили, в таксономии IFR признаки промышленных роботов не транслируются на понятие "сервисные роботы". Также промышленные роботы отличаются от специфического оборудования для производства, такого как, например, станки с ЧПУ, - тем, что они намеренно неспецифичны и, как следствие, их можно использовать для широкого и постоянно меняющегося спектра задач.
Манипуляторы могут снабжаться "концевыми эффекторами" (инструментами), специфичными для того или иного применения робота, что позволяет их перенастраивать под самые разные операции. В отличие от промышленных роботов, сервисные роботы могут быть не многофункциональными, а сфокусированы на отдельную задачу (робот для доставки или робот для автоматизации процесса доения). Если промышленные роботы имеют, как минимум, три степени свободы (обычно их число достигает шести или семи), то сервисные роботы могут иметь две программируемые степени свободы, а их число никак не ограничено сверху и целиком зависит от задач. Согласно стандарту IFR/ISO, сервисный робот - это "программируемый по двум или более осям приводной механизм с определенной степенью автономности, перемещающийся в пределах своей среды для выполнения поставленных задач 43Согласно ГОСТ Р 60.0.0.4-2023, сервисный робот (Service robot) - это робот для персонального или профессионального использования, который выполняет задания, полезные для людей или оборудования " [22].
Поскольку существуют машины, которые лишь частично подходят под указанные выше определения, IFR и ISO приходится вводить дополнительные понятия, и в частности такое понятие как "роботизированное устройство". Роботизированное устройство может иметь число степеней свободы меньшее, чем у роботов, и может быть полностью телеуправляемым [23].
Промышленные роботы могут устанавливаться как стационарно, так и на мобильной платформе (рис. 1.19).
IFR четко следует своей таксономии в публикациях статистики по промышленным роботам. Поскольку в определении промышленного робота однозначно зафиксировано, что это манипулятор, а промышленные роботы могут устанавливаться на различных мобильных платформах, то для того чтобы учитывать однотипные механизмы в своих отчетах, IFR относит к категории "промышленные роботы" только сами манипуляторы, а различные мобильные платформы учитывает отдельно в категории "сервисные роботы".
Подобное разделение в основном оправданно, поскольку большое число промышленных и сервисных решений использует интеграцию уже готовых промышленных манипуляторов в состав более сложного робота или роботизированного устройства.
Тем не менее сложный подход классификации, когда, по сути, одна часть машины называется "промышленным роботом", а другая "сервисным", на практике не всегда удобна - например, когда компания разрабатывает робота, включающего и платформу и манипулятор. Поэтому, как будет показано далее, не все аналитики придерживаются таксономии IFR, что может являться одной из многочисленных причин, почему количественные оценки рынка роботов у разных аналитических агентств существенно различаются.
Наличие двух типов роботов (промышленные и сервисные) с разными терминообразующими критериями создает определенные проблемы. Даже в профессиональных кругах ряд специалистов пытается транслировать признаки промышленных роботов и на сервисные роботы.
Процитируем, например, представителя канадского профсоюза UNIFOR Джейми Хейнса: "Беспилотный автономный автомобиль не является роботом, согласно определению того, что такое робот. У робота есть несколько исполнительных рычагов, и он управляется контроллером" [ "Источники использованной литературы" ].
В отличие от сервисной, промышленная робототехника - это развитый рынок, по которому много лет собираются консолидированные данные согласно устоявшейся методике. Рынок промышленных роботов далеко не так сильно диверсифицирован, как рынок сервисных роботов, ключевые поставщики промышленных роботов хорошо известны. Построение систем в области сервисной робототехники часто требует интеграции технологий большого числа сторонних производителей, создавая организационные решения экосистемного типа, что представляет сложности для определения всех игроков, вовлеченных в цепочку создания стоимости. Если данные по промышленным роботам относятся в основном к установкам (спрос), то данные по сервисным роботам - к продажам (предложение)44Следует упомянуть компанию Amazon с ее многотысячным парком сервисных мобильных логистических роботов, которые являются внутренними поставками собственного производства .
Отметим, что деление роботов на промышленные и сервисные, которое используется многими авторами вслед за ISO/IFR, отличается от традиционного деления рынков на горизонтальные и вертикальные секторы 45Горизонтальные секторы рынка - это секторы, которые удовлетворяют потребности клиентов в самых разных отраслях, а не в одной нишевой отрасли. Вертикальный сектор - это термин, используемый для описания конкретной отрасли.
Как известно, горизонтальные секторы рынка включают продукты, разработанные для удовлетворения потребностей широкого круга клиентов в различных отраслях и подходят для всех вертикальных (отраслевых рынков). Например, персональные компьютеры могут применяться и в здравоохранении, и в атомной отрасли, и в сельском хозяйстве. Напротив, продукты для вертикальных рынков сфокусированы на уникальных потребностях клиентов из соответствующих вертикальных индустрий.