Роботы: толкование термина, эволюция и классификация
Попытки выработки общего определения роботов
Прежде чем ссылаться на различные определения термина "робот", следует отметить, что множество "роботов" с исторической и научной точки зрения объединяет ряд существенно отличающихся друг от друга (морфологически и эксплуатационно) машин. По мнению авторов и редакторов настоящего курса, определение робота является скорее консенсусом разработчиков и потребителей в отрасли, а идеальной формулировки, устраивающий всех специалистов и не имеющей исключений, на данный момент не существует. Авторы курса скорее ставят задачу обобщить устоявшуюся терминологию и определить границы рынка, чем дать новое идеальное определение термину, решив задачу последних ста лет.
Заметим, что некоторые важные признаки, которые отмечены в одних определениях табл. 1.2, отсутствуют в других. Для того чтобы ответить на вопрос, насколько четко определен термин, полезно задаться вопросом - чем отличается изучаемый объект от смежных категорий и можем ли мы провести между ними четкую границу. Попробуем вычленить тот минимальный набор признаков, без которых не удается отличить роботов от "нероботов". Для этого рассмотрим признаки, упомянутые в табл. 1.2, более подробно.
Машины, которые ощущают, думают и предпринимают действия
Одно из определений, которое мы привели в табл. 1.2 и которое часто присутствует в статьях и учебниках по робототехнике, гласит, что "робот - это машина, которая чувствует окружающий мир, "думает" и действует каким-то физическим способом".
Для того чтобы более полно раскрыть суть данного толкования, следует вспомнить основные компоненты, из которых состоит классический робот, (рис. 1.2).
"Источники использованной литературы"
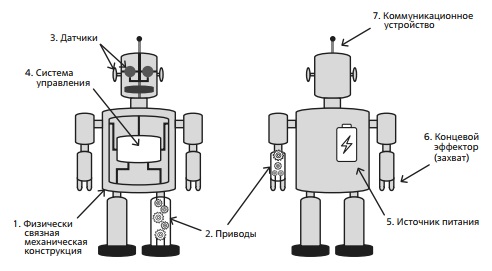
Согласно рис. 1.2, основными компонентами робота являются:
- Физически связная механическая структура, включающая корпус робота, конечности и другие физические компоненты, необходимые для движения и выполнения определенной работы.
- Приводы (актуаторы) - двигатели, редукторы и другие устройства, которые обеспечивают физическое движение тела и конечностей робота.
- Сенсоры (датчики), позволяющие роботу воспринимать окружающую среду и собирать информацию о ней. Под сенсорами подразумевается широкий набор устройств (видеокамеры, микрофоны, датчики давления, датчики приближения и другие10Более подробно речь о датчиках пойдет далее в этой лекции.).
- Система управления - программное и аппаратное обеспечение, которое позволяет роботу формировать управляющий сигнал для приводов на основе входных данных от сенсоров и команд оператора. Система управления отвечает за координацию различных компонентов робота, обеспечивает ему возможность выполнять сложные задачи с заданной точностью.
- Источники питания (например, батареи, топливные элементы или электросеть) - обеспечивают энергию, необходимую для приведения в действие исполнительных механизмов, работы системы управления и прочих систем робота.
- Рабочие органы (исполнительные механизмы) - инструменты или устройства, которыми робот управляет, чтобы обеспечить взаимодействие с объектами окружающей среды. Это могут быть электрические, пневматические и гидравлические захваты, сварочные головки и другие инструменты. Рабочий орган манипуляторов также называют концевым эффектором11В случае, когда робот рассматривается без рабочего органа, концевым эффектором считают условную точку на фланце, к которому крепится рабочий орган. Эта точка используется в кинематических расчетах для определения целевого положения робота. (Прим. ред.)..
- Коммуникационные устройства - позволяют роботу общаться с другими устройствами или с людьми. Устройства связи могут использовать беспроводные или проводные соединения, а также применять визуальные или звуковые сигналы.
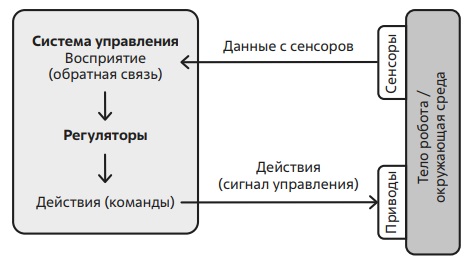
Перечисленные семь элементов на рис. 1.2 можно укрупнить, представив в виде трех ключевых систем (восприятия, управления и действия) (см. рис. 1.3).
Источник: [ "Источники использованной литературы" ]
Система восприятия - датчики, которые определяют физические параметры, такие как расстояние, температура, освещенность и другие.
Система управления - программное и аппаратное обеспечение, которое обрабатывает данные, определяет, какие действия должен предпринять робот на основе полученных данных, и посылает сигналы на приводы. Сюда же может входить задающий управляющий сигнал от оператора. Система выполнения действий - приводы и концевые эффекторы (рабочий инструмент), которые позволяют роботу выполнять физические действия в окружающей среде.
По сути, мы пришли к трем элементам, вынесенным в заголовок раздела: роботы - это машины, которые могут чувствовать, обрабатывать данные и принимать решения, а затем действовать12Приведенное определение говорит об автономности роботов - способности принимать решения и действия на их основе, однако, как будет показано далее, степень автономности роботов может быть различной .
На рис. 1.2 мы показали основные элементы роботов на примере упрощенной схемы гуманоидного робота. Эти же элементы можно продемонстрировать и на примере промышленного робота-манипулятора (см. рис. 1.4).
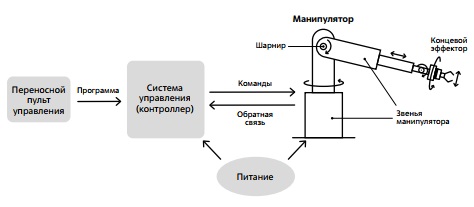
Звенья робота-манипулятора могут совершать вращательное и поступательное движение относительно друг друга.
Оператор задает программу действий для робота. Эта программа может быть создана с помощью специального пульта обучения робота (переносного планшета) (рис. 1.4), используя который можно запрограммировать определенную последовательность действий робота. Пульт обучения соединен с контроллером13Контроллер - компьютерная система управления, реализованная на определенной аппаратной архитектуре , который подключается к роботу для генерации команд движения манипулятора14Существуют и другие способы программирования роботов, они будут рассмотрены далее в этой лекции . Рука робота снабжена концевым эффектором, например захватом, который, в свою очередь, может быть оборудован сенсорами, необходимыми для контроля давления, оказываемого на удерживаемый предмет.
Позднее в данной лекции мы подробно рассмотрим, какие сенсоры используют роботы, здесь же приведем простую аналогию, поясняющую суть работы сенсоров для контролируемого захвата объекта. Когда мы берем в руки некоторый предмет, например стакан, наполненный водой, мы оцениваем его вес и сжимаем стакан с силой, необходимой для предотвращения проскальзывания. Если стакан начинает выскальзывать, мы сжимаем его сильнее.
Аналогично и робот (снабженный сенсорами) может приобретать "тактильные ощущения" - отслеживать проскальзывания при захвате изделия, давать обратную связь и корректировать свои действия (например, силу сжатия предмета). Мы подошли к понятию цикла обратной связи (рис. 1.5).

В систему управления поступает заданная в программе команда, она генерирует управляющее воздействие на приводы, которые приводят в действие рабочие органы - в нашем случае манипулятор захватывает предмет. Если сенсоры фиксируют недостаточность усилия для удержания объекта, то в систему управления передается сигнал, и она корректирует действия - реализуется цикл обратной связи, который регулярно (в соответствии с алгоритмом) повторяется роботом (см. рис. 1.5).
Перечисленные на рис. 1.4 и 1.5 компоненты могут сильно варьироваться от робота к роботу, что и определяет широкий спектр машин, которые мы называем роботами. Эти машины могут обладать разным набором и сложностью датчиков, разными приводами и набором исполнительных механизмов, позволяющих роботам передвигаться в разных средах, осуществлять движения на месте, регулировать подачу веществ, манипуляцию объектами и т. п., при этом вычислительная система робота (соответствующая разным функционалам) может представлять собой небольшую электронную схему или целый кластер компьютеров.
Мы более подробно рассмотрели смысл определения "машины, которые ощущают, думают и предпринимают действия", и далее проверим, является ли оно достаточным для того, чтобы отделить машины, которые мы называем роботами, от тех, которые мы так не называем. Обратимся к рис. 1.6, авторы которого рассматривают разные классы машин и дают графическую интерпретацию роботов как машин, имеющих сенсоры для восприятия окружающей среды, компьютерное управление для обработки полученных данных и принятия управляющих решений, а также исполнительные механизмы для воздействия на внешнюю среду.
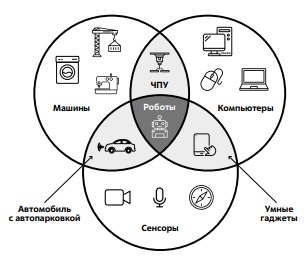
Источник: http://www.robotpark.com [ "Источники использованной литературы" ]