Роботы: толкование термина, эволюция и классификация
Отсутствие четкой границы между роботами в ручном, полуавтономном и полностью автономном режимах управления стимулирует аналитиков вводить все новые термины.
В частности, в атомной отрасли, где большинство роботизированных аппаратов имеют удаленное управление, используется термин RRS (Robotics and remote systems), который объединяет роботы и аппараты дистанционного управления [ "Источники использованной литературы" ].
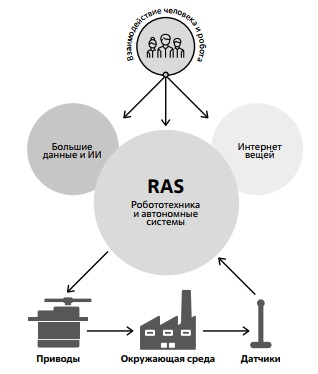
Пытаясь провести границу между роботами и близкими понятиями, интересно рассмотреть еще один относительно новый термин RAS (Robotics & Autonomous Systems), который переводится как "роботы и автономные системы" и определяется как совокупность научных и технических дисциплин, направленных на разработку сложных когнитивных систем [16].
Появление термина RAS связано с упомянутой ранее неоднозначностью трактовки термина "робот". Из названия следует, что RAS - это область, объединяющая робототехнику и другие автономные системы. В категорию RAS относят и AIA-системы, и классических роботов, и те беспилотные аппараты, которые, не всеми аналитиками причисляются к роботам (беспилотные аппараты, не имеющие роботизированных средств воздействия на окружающую среду, таких как, например, приспособления для захвата и выгрузки грузов33Единой точки зрения по данному вопросу не существует - ряд специалистов под "воздействием" формально считают и простое автономное перемещение робота в пространстве. (Прим. ред.).). В контексте отечественной терминологии подобным образом разделяют "беспилотные авиационные системы" и "роботизированные беспилотные авиационные системы", обладающие дополнительными исполнительными устройствами34Большинство научных школ не разделяют явно дронов и прочие робототехнические системы. (Прим. ред.)..
Некоторые авторы трактуют термин RAS еще более широко. Приведем цитату из отчета, упомянутого на рис. 1.11: "RAS - это глаза, руки и ноги больших данных, воспринимающие, принимающие решения и предпринимающие действия. Автономные системы не обязательно должны создавать "физические" действия с помощью робота.
Они также могут принимать решения и действовать в рамках цифровых систем, например, на финансовых биржах".
Источник: [ "Источники использованной литературы" ]
То есть, согласно мнению авторов рис. 1.11, RAS может относиться не только к физически связным системам, но и к распределенным, а также не только к воплощенным в железе, но и программным роботам и системам.
Таким образом, говоря о соотношении категорий "роботы" и "RAS", можно отметить, что роботы35В контексте данного курса под роботами мы подразумеваем физических роботов - это подмножество машин класса RAS, которые воплощены в физическое тело, обеспечивающее физическую связность всех элементов.
Функциональность роботов и их размеры
Мы описали целый ряд признаков роботов, и следует заметить, что большинство из них реализуются в макророботах. Наличие сенсоров, вычислительных элементов, сложной серии действий, определенной функциональности требует конкретного масштаба (размеров тела), в котором эти системы реализуются. Называя роботами микро- и наноустройства, мы понимаем, что реализовать в микрообъеме возможно лишь малую долю той сложной архитектуры и функциональности, которыми обладают макромашины.
В живой природе одноклеточные и многоклеточные организмы обладают разными возможностями. В живых организмах возможность реализации интеллектуальных функций напрямую связана с объемом и сложностью строения мозга. Аналогично в робототехнике, для того чтобы реализовать интеллект, сложные мехатронные системы, нужен определенный объем. Если мы называем роботами устройства, которые функционируют на уровне микро- и наноразмеров, мы не можем ожидать той же морфологии, анатомии (архитектуры), тех же интеллектуальных возможностей и сложности действий, которые реализуемы на макроуровне (см. рис. 1.12). То есть машины или устройства, реализуемые на микро- и наноуровне, будут принципиально отличаться по тем параметрам, которые в том числе заложены в основу определения и классификации классических макророботов.

Источник: по материалам [ "Источники использованной литературы" ]
Более того, если макророботы - это, в первую очередь, продукт мехатроники, то разработка микро- и нанороботов требует дополнительных технологий, которые развивались не только в русле мехатроники, но также в области биологии, химии, нанотехнологий и т. п.
Роботы, мехатроника и робототехника
Говоря о ключевых терминах, необходимо определить, в каком соотношении находятся понятия "робот", "робототехника" и "мехатроника". Если робот - это машина, то робототехника определяется как наука и технология создания, программирования, управления и эксплуатации роботов в различных отраслях экономики. Робототехника использует механику, электронику, программирование, искусственный интеллект и управление системами для создания роботов. В свою очередь мехатроника - это междисциплинарная наука, объединяющая знания из области механики, электроники, компьютерных наук и управления (см. рис. 1.13).
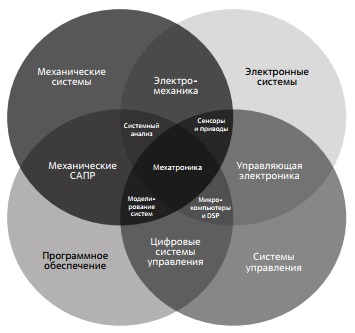
Источник: [ "Источники использованной литературы" ]
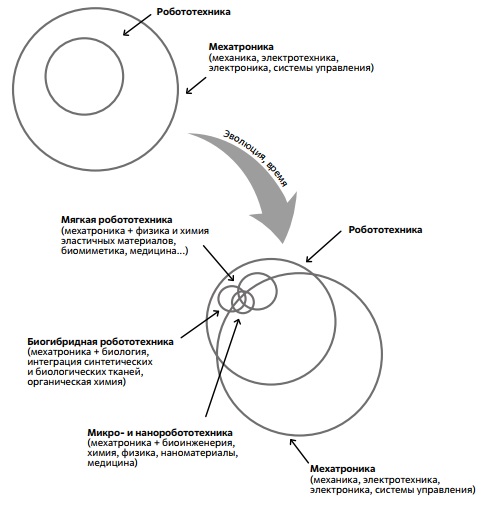
Мехатронная инженерия занимается изучением широкого спектра программируемых электромеханических систем, разработкой электроприводов и систем управления, используемых в широком наборе машин, таких как, например, стиральные машины, устройства для выдачи банкнот и т. п. В этом смысле традиционная робототехника считалась частью мехатроники (см. рис. 1.14 (верхняя часть)).
Однако с развитием гидравлических и пневматических приводов (особенно в мягкой робототехнике36Область науки и техники, которая занимается проектированием и управлением роботов, изготовленных из мягких, гибких материалов, которые могут менять форму в широких пределах. Подробнее о мягкой робототехнике пойдет речь далее, в других лекциях.), сложных систем управления с элементами ИИ, многоагентных и роевых систем роботов, а также новых типов микромашин современная робототехника в значительной степени вышла за рамки мехатроники.
Соотношение разных технологий, используемых в создании роботов, меняется. Об этом свидетельствует динамика роста количества разного рода публикаций по теме робототехники (см. рис. 1.15).
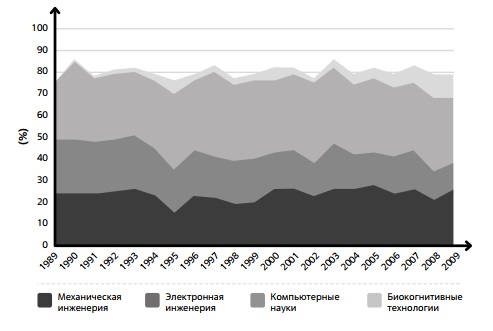
Источник: [ "Источники использованной литературы" ]
Доля публикаций из области электромеханики в рассматриваемое десятилетие падает, а доля в области биокогнитивных технологий за тот же период растет. За последние десять лет удельный вес публикаций, связанных с биокогнитивными исследованиями, продолжил рост, получили распространение такие типы роботов, которые невозможно создать, опираясь только на методы мехатронной инженерии: мягкие роботы 37Мягкая робототехника имеет общие с мехатроникой фундаментальные принципы и инструменты проектирования. Однако мехатроника фокусируется на проектировании и управлении жесткими механическими системами. Мягкая робототехника занимается проектированием и управлением мягкими, гибкими материалами, которые могут менять форму в широких пределах, нанороботы, биогибридные роботы.
Таким образом, можно сказать, что на современном этапе развития робототехники она опирается на мехатронику, но при наличии большого пересечения с мехатроникой наблюдается движение в область наук, связанных с применением новых материалов, биотехнологий, роевых систем и искусственного интеллекта, как было отмечено на рис. 1.14.