Роботы: толкование термина, эволюция и классификация
При этом многие роботы разрабатывались при финансировании военных ведомств как роботы двойного применения либо выполнялись в рамках проверки гипотез в рамках оборонных проектов.
Толкование терминов "робототехническое устройство", "робототехническая система", "роботизированная система", "робототехнический комплекс", "роботизированный комплекс" может отличаться при описании систем на базе промышленных и сервисных роботов.
При описании систем на базе промышленных роботов "роботизированная технологическая система - это любая производственная система, в которой используется один или несколько промышленных роботов" [ "Источники использованной литературы" ].
Роботизированные технологические системы могут быть разного масштаба и сложности: роботизированные ячейки, роботизированные участки, роботизированные линии (рис. 1.24). Роботизированные ячейки объединяются в роботизированные участки, роботизированные участки - в роботизированные линии, которые образуют роботизированное производство (завод, фабрику и т. п.).
Роботизированную ячейку или роботизированный комплекс объединяет ряд связанного оборудования: промышленные роботы, конвейеры, накопители, позиционеры, питатели и т. д.
Все роботизированные технологические комплексы также подразделяются на две большие группы: роботизированные комплексы, в состав которых входит какой-либо станок (металлорежущий, фрезерный, токарный, ЧПУ и т.п.), где промышленный робот используется лишь для перемещения заготовки из накопителя на станок и от станка на конвейер, и роботизированные ячейки, в которых робот является исполнителем технологической операции (окраски, сборки, сварки и т. п.). В первом случае это будет роботизированный технологический комплекс, во втором - роботизированный производственный комплекс.
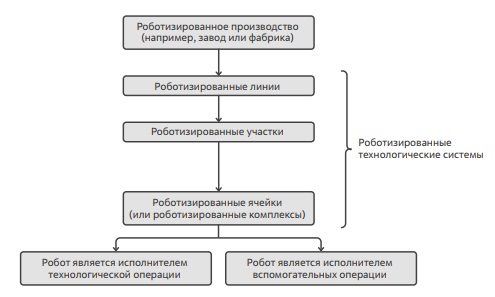
Рис. 1.24. Иерархия элементов технологического процесса в роботизированном производстве. Источник: Схема авторов по материалам "АЛЬФА ИНЖИНИРИНГ" (ROBOMATIC)
При описании сервисных роботов, если речь идет о телеуправляемых машинах, то их часто называют роботизированными устройствами, робототехническими системами или роботизированными комплексами. Но это правило не является строгим, и робототехнические устройства на практике и даже в научной и учебной литературе часто называют роботами.
В работе [ "Источники использованной литературы" ] можно найти классификацию роботов по степени автономности и близости к человеку. Самые "близкие" к телу - это носимые роботы - протезы и экзоскелеты, очевидно, что эти роботы имеют ограниченную автономность, находятся в контакте с человеком и постоянно им управляются.
Коллаборативные роботы - предназначены для совместной работы с человеком, причем данная работа подразумевает непосредственное соприкосновение с людьми и выполнение совместных операций над одним объектом. Такие роботы должны быть чувствительны к действиям и намерениям людей и могут адаптироваться к изменяющимся ситуациям. Данные роботы используются в производстве, здравоохранении и других отраслях.
Кооперативные роботы - предназначены для совместной работы с человеком в одном рабочем пространстве, но не подразумевают непосредственного соприкосновения с человеком и выполнение совместных операций над одним объектом. Чувствительны к присутствию и действиям человека и предназначены для безопасной работы рядом с ним, используются в производстве и логистике для помощи людям в выполнении повторяющихся или физически сложных задач. Существует множество классификаций роботов от разных авторов, и не все они следуют таксономии ведущих аналитиков. Если мы посмотрим на классификацию из популярного учебника "Robotics" (рис. 1.25), то здесь в категорию роботы отнесены и телеманипуляторы, и экзоскелеты, и нанороботы и так называемые тактильные реабилитационные роботы - устройства, которые предполагают использование современных датчиков и исполнительных механизмов для проведения восстановительной терапии частично парализованных пациентов, т. е. чтобы анализировать и корректировать движения пациентов.
Человеко-машинные робототехнические системы (отмеченные на рисунке) - это дополняющие человека роботы (протезы и экзоскелеты) и медицинские реабилитационные роботы, которые связаны с человеком во время процедуры восстановления здоровья. Очевидно, что во всех этих перечисленных случаях автономность роботов минимальна, поскольку робот в этих случаях не только реагирует на команды человека, но и, как в случае протезов, находится с челове ком в непосредственном физическом контакте.

Источник: [ "Источники использованной литературы" ]
Как было отмечено выше, IFR не объединяет в своих исследованиях рынки промышленной и сервисной робототехники, а, приводя оценки сервисных роботов, четко описывает категории, в которых она проводит количественный анализ. То есть IFR описывает лишь часть рынка робототехники. При этом существуют десятки других аналитических компаний, которые пытаются дать оценки глобального рынка робототехники или размеры рынка робототехники в разных отраслях. Эти задачи упираются в нехватку общепринятой таксономии. Очевидно, что, если собирать статистику, в которой учитываются количественные параметры в традиционных категориях, таких как поставки единиц машин на рынок, не имеет смысла учитывать в одном отчете и макророботы, и минироботы.
С другой стороны, предоставляя аналитику в области финансирования отдельных направлений развития робототехники, не учитывать финансирование таких новых направлений робототехники, как мягкая робототехника, биоробототехника, микроробототехника, тоже неправильно. Сложность построения общей таксономии объясняет наличие множества методик анализа рынка робототехники и наличие множественных отчетов с разными оценками.
Аналитические компании во многом по собственному усмотрению уточняют таксономию своего исследования и обозначают, какого типа роботов они учитывают в своем исследовании. Поэтому без уточнения методики конкретного автора количественные оценки представляют минимальную практическую пользу.
К вопросу о том, как разные исследователи оценивают рынок роботов и на какие методики опираются, мы вернемся во последующих лекциях данного курса.
Завершая лекцию, посвященный определениям и таксономии роботов, следует еще раз подчеркнуть, что при попытке ответить на вопросы, касающиеся объемов поставки или использования роботов, необходимо помнить, что существуют разные границы понятия. В упрощенном виде эту мысль можно пояснить рисунком 1.26.
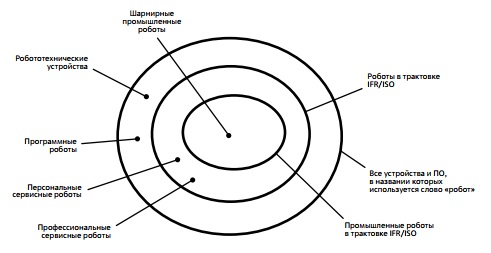
Рис. 1.26. Количественная оценка числа роботов на рынке непосредственно связана с тем, как мы определяем понятие "робот"
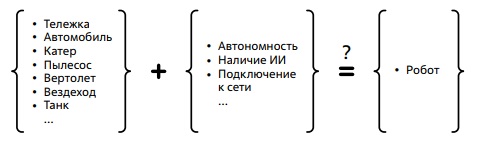
Заметим, что понятие "робот" относится не только к новым изобретениям (к тем машинам, которые появились в эпоху робототехники), но и многие ранее известные машины становятся роботами. В тот момент, когда та или иная машина на определенном этапе своего развития приобретает ряд свойств, таких как подключение к сети, беспилотную форму, определенную степень автономности, наличие ИИ, она, по сути, становится роботом.
Возьмем для примера такие машины как погрузчик, катер, вертолет, вездеход, танк (см. рис. 1.27), все они становятся сервисными роботами при вышеперечисленных условиях.
Все больше авторов и разработчиков называют подобные машины роботами. Иными словами, термин "робот" из понятия, которое характеризовало определенный узкий класс машин, постепенно становится понятием, которое характеризует стадию развития машин. Так же как в свое время тележка с двигателем, плот с двигателем стали называться машинами, так и множественные современные "машины" с появлением беспилотной автономности, дополнительных исполнительных механизмов и сенсоров, наличием системы автономного управления и элементов ИИ становятся роботами. В этом смысле понятия, которые сегодня еще пытаются использовать аналитики, как например "глобальный рынок робототехники", без указания на более узкую характеристику типа описываемых машин, окончательно потеряют смысл, так же как понятие "глобальный рынок машин" уже давно утратило свою актуальность.
Робототехника - настолько многогранная тема, что последовательность изложения материала для читателя вопрос весьма непростой.
Пытаясь предоставить обзор робототехнических решений, хочется охватить максимально широкую панораму и при этом неизбежно приходится опираться на технические термины, которые еще не введены в рамках данного курса и, возможно, не знакомы читателю. Трудно предугадать объем технических знаний читателя, поэтому мы старались строить повествование "по спирали" - от наиболее общего изложения базовых концепций, избегая технических деталей и вновь возвращаясь к уже затронутым темам на более подробном уровне по мере введения новых понятий. Надеемся, что подобный стиль изложения будет наиболее удобен читателю.
Мы обсудили некоторые вопросы толкования и классификации роботов. Заметим, что один из способов классификации - это возможность рассмотреть разные поколения этих машин. Это позволяет обсудить историю возникновения роботов, показать процесс формирования различных видов устройств во времени, что в свою очередь подведет нас к рассмотрению направлений будущего развития робототехники. Данные вопросы обсудим в отдельном разделе, посвященном эволюции роботов.