Роботы: толкование термина, эволюция и классификация
Несмотря на то что микророботы и нанороботы могут использовать некоторые принципы мехатроники, их проектирование и управление кардинально отличаются в связи с размером и характером взаимодействия с окружающей средой. Для создания микророботов и нанороботов необходимы технологии и знания в области микро- электромеханики (MEMS, Micro-electromechanical systems), которая занимается разработкой микромеханизмов и микросистем на кремниевой основе, биомедицинской инженерии и биохимии, знания в области нанотехнологий, которые занимаются изучением и разработкой материалов и устройств в нанометровом масштабе. Нанороботы могут быть созданы из специальных наноматериалов и могут быть управляемыми с помощью света, магнитных полей или химических реакций 38Эти системы называют роботами, при этом они не удовлетворяют классическому определению роботов .
Часть микророботов, например, те, что используются для доставки лекарств в целевые клетки или для диагностики болезней, микро- роботы для проведения биопсии и минимально инвазивных хирургических операций, непосредственно связаны с биомедицинской инженерией.
Наполнение терминов, связанных с робототехникой, меняется во времени, изменяя их смысловое соотношение. Например, в последнее время мы различаем "роботы" и "автоматы", определяя робота как программируемое устройство, способное работать в автоматическом режиме с помощью камер, сенсоров, датчиков и других инструментов, способные выполнять различные задачи за счет своей программы и реагировать на изменение окружающей среды, в отличие от автоматов, которые выполняют одну фиксированную задачу, определяемую при изготовлении автомата (например, автомата по продаже напитков). При этом можно сказать, что первые роботы, создаваемые в 1960-х годах 20 века, были автоматами и служили для выполнения простейших однотипных операций в промышленности.
И в то время термин "робот" мог использоваться как синоним автомата. Позже, в 1970-х годах начало проявляться различие между роботами и автоматами, которое состоит в том, что роботы могут выполнять более сложные операции, включающие взаимодействие с окружающей средой и выполнение задач, требующих анализа и принятия решений. Именно возможность формирования или выбора линии поведения отличает робот от автоматической системы, которая действует исключительно по заранее заданному сценарию, не допускающему никаких отклонений вне зависимости от изменяющейся обстановки.
Эволюция терминов идет вслед за эволюцией самих роботов, появление каждой новой машины ставит вопрос перед специалистами, в какую "ячейку", в какой ряд поставить эту машину, как интерпретировать процесс развития.
Мы рассмотрели существующие концептуальные определения понятия "робот" и продемонстрировали, что на практике крайне сложно построить единую общепринятую логику, позволяющую определить, какие машины, комплектующие и ПО следует учитывать с научной и экономической точек зрения при подсчете рынка робототехники, а какие нет. Поэтому далее мы будем рассматривать конкретные мнения аналитических компаний и стандартизующих организаций, которые используют ту или иную таксономию для описания рынка робототехники.
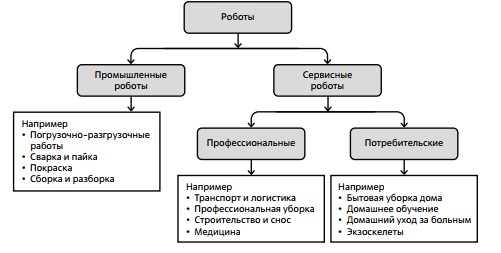
Напомним, таксономия - это описание структуры определенной совокупности объектов с помощью непротиворечивого набора определений, которые позволяют упорядочить и классифицировать информацию. В таксономии смысловое наполнение термина, в частности "робот" и "робототехника", вытекает из совокупности определения отношения изучаемого понятия к смежным. В качестве наглядного примера иерархической структуры определений, относящихся к робототехнике, можно привести иллюстрацию на рис. 1.16. Здесь в верхней части показан некий набор терминов, для которых роботы являются подмножеством 39В некоторых из рассмотренных случаев речь идет о пересечении двух множеств , а в нижней части представлены термины-подмножества по отношению к понятию "робот".

Представленную на рис. 1.16 иерархическую структуру можно продолжить вниз: в свою очередь сервисные роботы делятся на подмножества роботов для профессионального использования и персонального и так далее.
Наличие таксономии необходимо для понимания состава и структуры рынка. Таксономия позволяет сравнивать и агрегировать данные из различных источников, стандартизировать методологию и облегчить отслеживание изменений рынка во времени.
Если общие концептуальные определения выделяют наиболее существенные признаки и предполагают длительное использование, то таксономия существует на определенный момент времени, предполагает ревизию определений и толкований терминов при появлении новых товаров и технологий и может быть привязана к исследованиям конкретной аналитической компании.
Если мы говорим о рынке роботов, то мы должны определиться, из каких подсистем он состоит, так чтобы между ними не было пересечения. При построении однозначной таксономии необходимо дать такой набор определений, который бы устранял неоднозначности, противоречия, двойной зачет. А для описания рынка выбрать такие объекты, которые можно сравнивать между собой. Эти задачи решают аналитические компании. Поэтому в дальнейшем мы рассмотрим системы толкования и классификации, опираясь на данные аналитических и стандартизирующих организаций и прежде всего с опорой на таксономию IFR International Federation of Robotics (Международная федерация робототехники), которая проводит ежегодные исследования мирового рынка робототехники на основании опросов, исследований и статистики.
Попытки построения таксономии аналитическими агентствами
Выше мы продемонстрировали сложности при построении общего определения роботов. Переходя к определениям стандартизирующих организаций и их таксономии, мы фокусируемся не столько на обосновании логичности того или иного толкования, сколько на необходимости однозначного описания рынка роботов и его сегментов с целью предотвратить двойной учет, конкретизировать правила, которые помогают проводить рыночную аналитику на данный момент времени.
Именно по этому пути идет IFR. В частности, компания предлагает прежде всего делить роботов на промышленные и сервисные (рис. 1.17).
При этом компания констатирует, что та логика и те терминообразующие признаки, которые сложились в определении промышленных роботов, не транслируются напрямую на класс роботов, называемых сервисными. Именно поэтому IFR, вместо того чтобы оперировать понятием "Глобальный рынок роботов" (Global Robotics market)40Целый ряд аналитических компаний пытаются оценить именно глобальный рынок роботов , рассматривает два отдельных рынка - "рынок промышленных роботов" и "рынок сервисных роботов" и публикует два разных отчета. IFR объясняет это тем, что таксономия относительно промышленных роботов уже отработана, а таксономия в отношении сервисных роботов находится в стадии становления.
IFR осуществляет деление роботов на промышленные и сервисные, в соответствии с предполагаемым применением машин, подчеркивая, что данная классификация исходит не из кинематической схемы или каких-либо иных признаков роботов, а именно на основе области применения.
Согласно IFR, промышленные роботы - это роботы "для использования в приложениях промышленной автоматизации", в то время как сервисный робот "выполняет полезные задачи для людей или оборудования, исключая приложения промышленной автоматизации".