Будущее робототехники
Необходимость для человека общения со все более умной машиной (мимика, жесты, речь) заставляет роботов приобретать все новые признаки, делающие его похожим на живой и человекоподобный организм.
Говоря о придании роботам признаков антропоморфности как средстве повышения симпатии со стороны людей, следует отметить, что степень этой симпатии по мере роста антропоморфности машин носит нелинейный характер. Известно наличие провала на этой кривой - эффекта так называемой "зловещей долины" (рис. 14.7) - термина, введенного японским ученым Масахиро Мори.
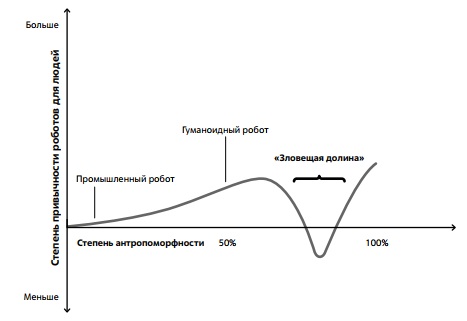
Рис. 14.7. Динамика привычности (симпатий) людей в отношении роботов в зависимости от степени антропоморфности
Источник: Масахиро Мори [ "Источники использованной литературы" ]
В 1978 г. Мори провел опрос, анализируя эмоциональную реакцию людей на внешний вид роботов. По результатам опроса была построена кривая, которая показала, что чем больше робот похож на человека, тем более приятным на вид он представляется людям. Однако на определенном этапе мелкие несоответствия оригина лу в человекоподобных роботах выглядят для людей неприятными и даже зловещими, поэтому провал на графике и был назван "Зловещей долиной". Согласно Мори, кривая роста симпатий к роботам при дальнейшем росте сходства преодолевает впадину и стремится вверх. Есть вероятность, что этот теоретический прогноз Мори не совсем верен. Стопроцентно похожих на людей роботов пока не создано, и можно выразить определенные сомнения, что робот, идеально похожий на человека, не будет вызывать отторжения. Сама вероятность того, что человек не сможет отличить синтетического гуманоида от живого человека, должна вызывать опасения.
При этом очевидно, что рост притягательности, лежащий в эмоционально-этической сфере, не отрицает практической целесообразности биоморфности в роботах.
Дискомфорт при восприятии человеком искусственной биоморфности отмечен не только в работах Мори. Феномен "зловещей долины" соседствует с другими проблемами, которые возникают в попытках ответить на вопросы, связанные с понятием морали: насколько этично создание домашнего робота в виде точной копии человека, насколько этично заменить домашних питомцев на их искусственных двойников, насколько этично интегрировать живые и неживые ткани, имплантировать чипы в биологические существа и роботизировать их? Вопросы этого плана будут рассмотрены отдельно в разделе, посвященном вопросам этики в робототехнике.
Интересно отметить, что человек приходит к тем же решениям, что уже реализованы в животном мире, не только за счет того, что "подсматривает" что-то у живой природы, но и в силу того, что и природа, и человек используют одни и те же законы для построения жизнеспособных существ, которые должны эффективно функционировать в окружающей среде, построенной по определенным единым физическим законам.
В этой связи следует отметить, что человек в одних случаях заимствует идеи построения искусственных организмов, к которым уже пришла эволюция, в других, например, исходя из моделирования физических процессов приходит к тем же решениям, что и природа, рассчитывая оптимальную форму машин, предназначенных для воздухоплавания, перемещения под водой и так далее.
Более того, можно привести такой пример: многопараметрическая оптимизация, направленная на создание конструкции с оптимальным распределением напряжений под действием эксплуатационных нагрузок и обеспечивающая минимальную материалоемкость, приводит к бионическим решениям в виде древовидных конструкций с элементами переменной толщины или в виде пористых структур, аналогичных тем, что используются в костях животных.
Именно такие бионические элементы, обеспечивающие оптимальную материалоемкость, эффективность и цену, все чаще встречаются в современной робототехнике. Заметим также, что изготовить элементы произвольной формы становится все проще при использовании 3D печати. Интересным является тот факт, что в основе 3D печати все чаще задействуются шарнирные роботы. По сути, на этом пути мы подходим к производству по формуле "Роботы создают ро ботов по образу и подобию человека".
Эволюция роботов обусловлена необходимостью создания все более эффективных машин при обеспечении их оптимальной капиталоемкости, энергоемкости и при минимальном нанесении вреда человеку, а следовательно, и всей природной экосистеме, которая является основой для выживания человечества.
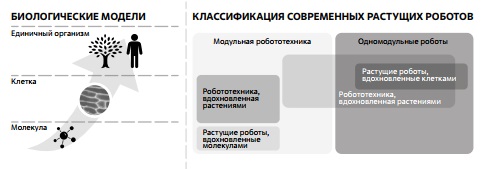
Ученые пытаются имплементировать в роботах такие функции живых систем как рост, адаптация, регенерация тканей и даже создают машины из гибридных материалов, соединяющих живую и неживую материю, что выводит робототехнику на еще более высокий уровень сходства с человеком и животными ( рис. 14.8).

Источник: по материалам [ "Источники использованной литературы" ]
Практически каждое из перечисленных на рис. 14.8 направлений придания роботам биоморфных свойств формирует специфическую область исследования. Возьмем, к примеру, способность живых организмов к росту. Эта способность вдохновила ученых на создание роботов с возможностью самостроительства - машин, которые изменяют свое тело путем постепенного добавления материала. Причем внутри этого направления сформировались такие ответвления как роботы, вдохновленные ростом молекул, ростом клеток и ростом организмов ( рис. 14.9).
Источник: [ "Источники использованной литературы" ]
В левой части рис. 14.9 показаны биологические модели, используемые для классификации растущих роботов, которые представлены в виде иерархии: молекулы, клетки, организмы. Справа дана классификация растущих роботов. Рассмотрим схемы, представленные на рис. 14.9, более подробно.
Роботы, вдохновленные поведением молекул, - направление робототехники, которое черпает вдохновение в структуре, поведении и функциях молекул в природе. Говоря о механизмах роста, имеют в виду роботов, создание которых было вдохновлено полимеризацией молекул при образовании ДНК. Искусственные воплощения таких механизмов основаны на стохастических столкновениях частиц, которые не активны, когда разъединены, но приобретают функциональность после установления связей, обеспечивающих самосборку, которая и рассматривается как рост.
Роботы, вдохновленные поведением клеток или построенные из клеточных модулей, представляют собой в основном сборные мехатронные ячейки, которые объединяются в единый многоклеточный робот. Отдельные клеточные модули обладают простой функциональностью и ограниченными возможностями.
Концепция клеточной робототехники включает в себя идею "роевой робототехники". В клеточной робототехнике примитивный интеллект каждого элемента клеточной колонии используется для организации сообщества роботов с точки зрения их координации и сотрудничества, аналогично социальным роям насекомых. Рои можно рассматривать как своеобразные квазиорганизмы, способные адаптироваться к изменениям в окружающей среде и реагировать на них, следуя определенным моделям поведения.
Роботы, вдохновленные процессом роста организмов, представляют собой направление, связанное с разработкой и созданием роботов, которые имитируют биологический рост путем постепенного добавления материала.
Направление перспективно с точки зрения создания систем, которые эффективно адаптируются к окружающей среде благодаря своей морфологии.. Эти возможности особенно важны в области экстремальной робототехники [ "Источники использованной литературы" ].
Несмотря на то что и животные, и растения испытывают процесс роста, характер этого роста различен. Животные, включая человека, растут до определенных размеров, соответствующих зрелости организма, в то время как растения могут продолжать свой рост на протяжении всей жизни.
Размеры животных незначительно варьируются от особи к особи, растения могут существенно изменять свой рост в зависимости от внешней среды. Растение может занимать корнями ту емкость, кото- рая доступна, и, например, способно за счет этого расти на скальных породах, где почвы практически нет. В отличие от животных, которые мобильны, растения используют рост для передвижения, изучения и колонизации окружающей среды.
"Растительная" робототехника стремится воссоздать возможности растений в роботах, реализуя такие их свойства как адаптивность растущего организма в средах, где ограничения заранее неизвестны, а доступ затруднен.