Будущее робототехники
Другая пара противонаправленных тенденций (3-4) показывает, как будет идти коэволюция ИИ и роботов.
Направление, обозначенное как пункт 3 ( рис. 14.2), предполагает, что программное обеспечение с ИИ будет развиваться в рамках индивидуального внутреннего воплощенного ИИ, то есть интегрироваться внутрь контроллера отдельного робота и отвечать за обработку информации от внешнего мира и принятие решений, а персональный опыт "проб и ошибок" станет основой для развития ИИ. Робот будет выступать как способ физической (аппаратной) реализации ИИ, так что жизненный опыт робота будет формировать его внутренний индивидуальный ИИ в процессе освоения мира. Эта тенденция ближе к концепции развития (обучения) отдельного человека, при которой его внутренний опыт служит руководством к действию для решения задач общения с внешним миром, исходя из интересов этого агента2В данном случае агентом является человек .
Направление, обозначенное как пункт 4, предполагает, что программное обеспечение с ИИ будет в большей мере развиваться как внешняя (по отношению к отдельному роботу) система, к которой робот сможет подключаться для получения знаний и решения его задач. В этой концепции облачный (серверный) ИИ получает информацию от любых подключенных систем, в том числе и роботов. Данный коллективный интеллект развивается в процессе получения знаний от различных акторов, в том числе роботов, и разделяет знания между всеми подключенными агентами. Отдельные роботы имеют возможность подключаться к знаниям, которые были получены другими акторами. Внешняя система может разделять задачи между роботами, управлять группами роботов, контролировать их работу. Эта концепция ближе к развитию "коллективного разума", опосредованно определяющего действия отдельных людей.
Человек создан природой так, что знания он набирает сам, путем умственных усилий, а не путем загрузки "чужой" информации непосредственно из интернета. Робот может иметь прямой доступ к знаниям коллектива роботов, к накопленным знаниям, ему не нужно учиться с нуля. Кроме того, робот может быть создан в самых разных формах. Природа создала многообразие животных и только один вид с уникальными умственными способностями, что и определило статус человека как "вершины эволюции". Робототехника вполне может наделить передовыми общими интеллектуальными способностями самых разных роботов - больших и маленьких, ползающих, плавающих и летающих. Каждая из машин сможет заполучить коллективный интеллект, который будет доступен ученым и инженерам на данном этапе развития техники, а "облачные" знания смогут накапливаться и приумножаться усилиями в освоении мира всей совокупностью разных роботов.
Разнонаправленные тенденции можно видеть рис. 14.2
Пытаясь ответить на вопрос, существует ли некий генеральный вектор в развитии робототехники на современном этапе, заметим, что тренд на биовдохновение и слияние робота и человека отмечен не только в центре диаграммы 14.1 и на диаграмме 14.2. Тренд на биовдохновение, биоэкономику, экоинновации, на сращивание живых и неживых машин, на более экологичное встраивание искусственных машин в существующую природную экосистему является глобальным трендом, который выражает суть так называемой пятой промышленной революции (рис. 14.3).
В упомянутую тенденцию вписывается и тренд на сотрудничество робота и человека, которое требует от роботов в определенном смысле совместимости с человеком и по механическим, и по скоростным, и по интеллектуальным параметрам.
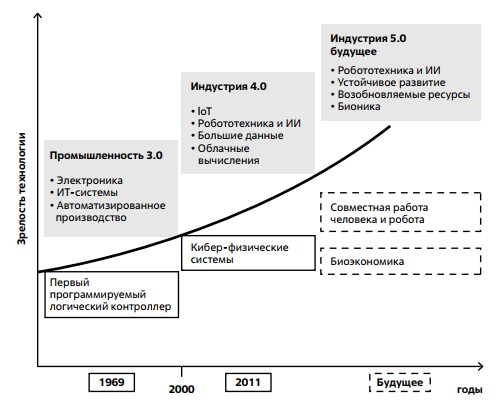
Рис. 14.3. Пятая промышленная революция как курс на устойчивое развитие и более экологичное развитие искусственных машин
Источник: [ "Источники использованной литературы" ]
Учитывая тот факт, что большинство аналитиков связывают основные прорывы в робототехнике с темой биовдохновения, рассмотрим это направление (этот магистральный вектор) немного подробнее и обсудим, какие технологические прорывы просматриваются в рамках этого взгляда на развитие робототехники.
Биовдохновленные роботы
Под биовдохновленной робототехникой подразумевают использование фундаментальных биологических принципов, которые, будучи переведенными в инженерные правила проектирования, приводят к появлению устройств, действующих подобно природной системе. Это широкое направление с множеством ответвлений, о чем красноречиво говорит изрядное количество близких по смыслу терминов: "биовдохновение" ("биоинспирация"), "бионика", "биомиметика", "биомимикрия", "бионический дизайн", "экоинновации". Часть этих терминов и их взаимосвязь поясняются схемой (рис. 14.4).

Источник: [ "Источники использованной литературы" ].
Биомимикрия - это подражание природным организмам, в том числе направленное на сохранение органического мира и защиту природы. Человек вынужден так преобразовывать окружающую среду, чтобы не уничтожить себя, и, следовательно, создавать машины с учетом их экологичности. Авторы рис. 14.4 связывают биомимикрию с понятием экоинноваций - новаций, направленных на создание экологически чистых и ресурсосберегающих технологий (например, использование в робототехнике биоразлагаемых материалов).
Бионика - это наука и технология, связанная с проектированием устройств, в которых, биологические системы заменяются на электронные. Например, проектирование системы робототехнического зрения по образцу человеческого глаза.
Биомиметика выступает как методологический аспект, связанный с биовдохновением, посредством функционального анализа биологических систем и применения биологических моделей для решения практических задач.
Биовдохновение (bio-inspiration 3В некоторых источниках используется калька с английского "биоинспирация". ) - это широкий термин, описывающий процесс черпания вдохновения в природных процессах и структурах для решения технических проблем.
Биовдохновение проявляется на разных уровнях, по сути все основные компоненты искусственных машин имеют аналоги в живой природе (рис. 14.5).
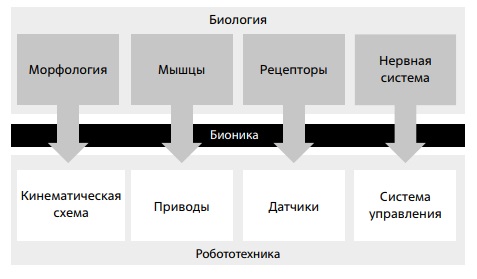
Заметим, что по мере того как человек все больше проникает в тайны строения живых организмов, по мере появления новых материалов и технологий их обработки, человек все более успешно реализовывает природные структуры и механизмы в искусственных машинах.
Начав с копирования внешних атрибутов, таких как крылья птиц и насекомых, человек переходит к воссозданию все более тонких механизмов (строение нейрона, организация клеток мозга и т. п.). И чем глубже человек будет проникать в механизмы своего взаимодействия с окружающим его миром, тем ближе он будет подходить к задаче создания роботов с полной автономностью, с внутренним целеполаганием и, возможно, в перспективе с наличием сознания.
Заметим, что биоморфизм и антропоморфизм, о котором мы начали разговор в первых лекциях, тоже являются проявлением биовдохновения, поскольку вместе с природными механизмами функционирования роботам придаются и внешние сходства с природными объектами.
Человек реализовал роботов в виде самых различных животных, используя их особенности для адаптации к разным средам обитания на Земле. Но, конечно, самым распространенным явлением биоморфизма является антропоморфизм - создание роботов, похожих на человека.
Тело человека эволюционировало в систему, оптимизированную для решения задач по освоению мира, и сам человек строил искусственный мир так, чтобы он был удобен для использования. С развитием технологий становится все более реальным создание роботов, которые могут двигаться, чувствовать и взаимодействовать с окружающей средой подобно человеку.
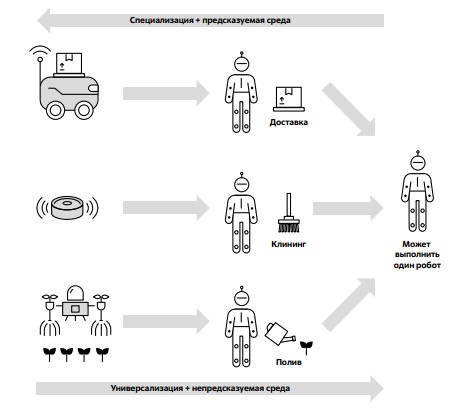
Заметим, что по мере попыток создания универсальных роботов человек приходит к созданию машин, все более антропоморфных по дизайну из-за потребности имитировать человеческие действия и предоставлять более универсальные и адаптируемые инструменты для выполнения различных задач. Тот искусственный мир, который человек построил для себя и "под себя", предполагает, что роботы, выполненные в похожей на человека форме, будут способны лучше "вписаться в этот мир". Для того чтобы использовать те орудия труда, которые уже использует человек, роботы должны быть человекоразмерны и человекоподобны.
Чем больше функций должен будет интегрировать в себя умный робот (пылесосить, мыть пол, посуду, ухаживать за ребенком), тем больше он будет похож на человека, который может совмещать все эти функции (рис. 14.6).