Диагностическая задача в интервальной постановке
Постановка задачи и алгебраический метод решения
В классической диагностической задаче для линейных автоматов предполагается, что каждая выходная реакция в момент времени  - это вектор
- это вектор ![\bar y(t)=[y_1(t), \dots, y_m(t)]'](/sites/default/files/tex_cache/0761f2221523505d680b4b1d096e414b.png) , координаты
, координаты  которого представляют собой точные значения. Поскольку практически значения координат наблюдаемой реакции автомата получаются в результате измерений, они неизбежно содержат погрешности, размеры которых зависят от точности измерительных приборов. Поэтому более реальной по сравнению с классической задачей является диагностическая задача , в которой реакция автомата представлена в виде интервалов в поле
которого представляют собой точные значения. Поскольку практически значения координат наблюдаемой реакции автомата получаются в результате измерений, они неизбежно содержат погрешности, размеры которых зависят от точности измерительных приборов. Поэтому более реальной по сравнению с классической задачей является диагностическая задача , в которой реакция автомата представлена в виде интервалов в поле  :
:
![\bar y(t)=[[ \underline y_1(t), \bar y_1(t)], \dots, [\underline y_m(t), \bar y_m(t)]]'](/sites/default/files/tex_cache/4aef68c709e4644303c72652c15fab70.png) |
( 20.1) |
Решением интервальной диагностической задачи, заключающейся в определении начального состояния автомата по наблюдаемой его реакции на подаваемую диагностическую последовательность, будем считать такое состояние автомата из множества допустимых начальных состояний, если, стартуя из него, автомат в каждый момент времени порождает выходной вектор, координаты которого принадлежат интервальному вектору (20.1). Заметим, что, как и в случае классической задачи, мы будем считать интервальную диагностическую задачу разрешимой, если искомое начальное состояние определяется однозначно.
Понятно, что чем больше ширина интервалов в выходных векторах, тем сложнее найти начальное состояние автомата. Если же интервалы в выходных векторах полностью покрывают поле , то нахождение начальных состояний становится невозможным. Такая ситуация вполне может иметь место при малых значениях  , поэтому далее предполагается, что
, поэтому далее предполагается, что  .
.
Для решения диагностической задачи необходимо иметь ДП, общий метод построения которой в классическом случае описан в [18]. Остановимся кратко на методе построения ДП, ориентированном на решение интервальной диагностической задачи. Построение ДП в этом случае может быть осуществлено с использованием конструкции классического диагностического дерева [18] с внесенными в нее некоторыми незначительными изменениями. Эти изменения касаются способа формирования преемника  -группы.
-группы.
В классическом случае каждое состояние автомата любого сигма-множества -группы имеет единственного преемника в одном и только одном сигма-множестве преемника упомянутой -группы. Отсюда следует, что в классическом случае каждая -группа, связанная с любой ветвью диагностического дерева, содержит в своих сигма-множествах одно и то же суммарное число состояний, равное мощности множества допустимых начальных состояний автомата.
Построение преемника сигма-множества -группы по некоторому входному сигналу в интервальном диагностическом дереве будем осуществлять следующим образом. Сначала вычисляем все состояния-преемники этого сигма-множества по упомянутому входному сигналу и соответствующие "интервальные" реакции автомата. Каждая "интервальная" реакция ЛА заменяется множеством точных реакций, которое представляет собой все возможные комбинации из точных значений, принадлежащих соответствующему интервалу. Таким образом, каждому состоянию-преемнику будет соответствовать некоторое конечное множество точных реакций. Cостояния-преемники будут помещаться в одно и то же сигма-множество, если в соответствующих им множествах точных реакций есть совпадающие между собой. Это правило формирования сигма-множеств -группы следующего уровня может привести к тому, что одно сигма-множество предшествующего уровня в следующем уровне дерева попадает в несколько сигма-множеств. Таким образом, в двух новых сигма-множествах может находиться одно и то же состояние-преемник. Отсюда вытекает, что общее число состояний в преемнике -группы в интервальном диагностическом дереве может оказаться больше мощности множества допустимых начальных состояний автомата.
Что касается правил, по которым некоторая ветвь интервального диагностического дерева становится оконечной, то они остаются теми же, что и в классическом диагностическом дереве. Проиллюстрируем построение интервального диагностического дерева на примере.
Рассмотрим ЛА над полем  , заданный с помощью следующих характеристических матриц:
, заданный с помощью следующих характеристических матриц:
![A=
\left [
\begin {matrix}
2&1&4\\
5&2&6\\
3&0&1
\end {matrix}
\right ],
B=
\left [
\begin {matrix}
3\\
4\\
1
\end {matrix}
\right ],
C=
\left [
\begin {matrix}
5&0&3\\
1&4&6
\end {matrix}
\right ],
D=
\left [
\begin {matrix}
6\\
1
\end {matrix}
\right ]](/sites/default/files/tex_cache/17d03d933ae2772ef8b36faab1f53347.png)
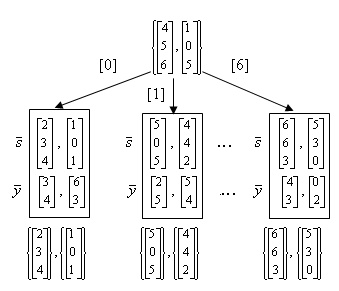
Пусть множество допустимых начальных состояний этого ЛА содержит два следующих состояния: ![[456]' [105]'](/sites/default/files/tex_cache/0ed3f8cd32d92cac4bd275a154f8c76b.png) . Классическое диагностическое дерево для рассматриваемого автомата представлено на рис.20.1. Над каждой -группой на этом рисунке в прямоугольнике помещена информация о состояниях-преемниках
. Классическое диагностическое дерево для рассматриваемого автомата представлено на рис.20.1. Над каждой -группой на этом рисунке в прямоугольнике помещена информация о состояниях-преемниках  и выходных реакциях
и выходных реакциях  . Ниже помещены сигма-множества (в фигурных скобках), составляющие -группу. Из этого рисунка следует, что рассматриваемый автомат имеет 7 диагностических последовательностей длины 1:
. Ниже помещены сигма-множества (в фигурных скобках), составляющие -группу. Из этого рисунка следует, что рассматриваемый автомат имеет 7 диагностических последовательностей длины 1:  .
.
Теперь построим фрагменты интервального диагностического дерева (одну его ветвь для входного сигнала  ) в предположении, что при измерении реакции ЛА по каждой координате выходного вектора может произойти ее искажение на одну единицу как в меньшую, так и в большую сторону. Этот фрагмент представлен на рис.20.2.
) в предположении, что при измерении реакции ЛА по каждой координате выходного вектора может произойти ее искажение на одну единицу как в меньшую, так и в большую сторону. Этот фрагмент представлен на рис.20.2.
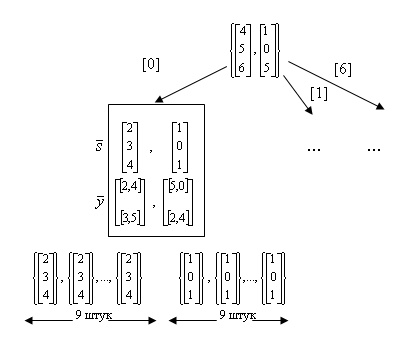
При переходах ЛА из состояний ![[456]', [105]'](/sites/default/files/tex_cache/b6a09e15c1956fec6e37d1aea5c780b8.png) в состояния
в состояния ![[234]', [101]'](/sites/default/files/tex_cache/946efdf75cb10c8158a4d23d9f97551b.png) соответственно вычисляемые точные реакции есть
соответственно вычисляемые точные реакции есть ![[34]', [63]'](/sites/default/files/tex_cache/5c5902bc23200a8bbe1cb862b28d7411.png) . При наличии оговоренных выше погрешностей измерения эти точные реакции превращаются в интервальные реакции
. При наличии оговоренных выше погрешностей измерения эти точные реакции превращаются в интервальные реакции ![[[2,4]', [3,5]]', [[5,0], [2,4]]'](/sites/default/files/tex_cache/72f432a05dad4d9c1e4f3e231448df23.png) . Каждую из этих реакций заменяем соответственно множеством всех возможных комбинаций величин из приведенных интервалов:
. Каждую из этих реакций заменяем соответственно множеством всех возможных комбинаций величин из приведенных интервалов:
![\left \{
\left [
\begin {matrix}
2\\
3
\end {matrix}
\right ],
\left [
\begin {matrix}
2\\
4
\end {matrix}
\right ],
\left [
\begin {matrix}
2\\
5
\end {matrix}
\right ],
\left [
\begin {matrix}
3\\
3
\end {matrix}
\right ],
\left [
\begin {matrix}
3\\
4
\end {matrix}
\right ],
\left [
\begin {matrix}
3\\
5
\end {matrix}
\right ],
\left [
\begin {matrix}
4\\
3
\end {matrix}
\right ],
\left [
\begin {matrix}
4\\
4
\end {matrix}
\right ],
\left [
\begin {matrix}
4\\
5
\end {matrix}
\right ]
\right \} ,\\
\left \{
\left [
\begin {matrix}
5\\
2
\end {matrix}
\right ],
\left [
\begin {matrix}
5\\
3
\end {matrix}
\right ],
\left [
\begin {matrix}
5\\
4
\end {matrix}
\right ],
\left [
\begin {matrix}
6\\
2
\end {matrix}
\right ],
\left [
\begin {matrix}
6\\
3
\end {matrix}
\right ],
\left [
\begin {matrix}
6\\
4
\end {matrix}
\right ],
\left [
\begin {matrix}
0\\
2
\end {matrix}
\right ],
\left [
\begin {matrix}
0\\
3
\end {matrix}
\right ],
\left [
\begin {matrix}
0\\
4
\end {matrix}
\right ]
\right \}](/sites/default/files/tex_cache/d6b2ae5adb0ce0ba79379f92e4e2ebb5.png)
С использованием этих множеств построим теперь сигма-множества -группы. Так, поскольку реакция ![[23]'](/sites/default/files/tex_cache/bfb0f9157a716d7bf7c534c32c44e197.png) из первого множества не совпадает ни с одной реакцией из второго, то соответствующее ей состояние-преемник
из первого множества не совпадает ни с одной реакцией из второго, то соответствующее ей состояние-преемник ![[234]'](/sites/default/files/tex_cache/570516a2b1059c457b2629db8b5fbd07.png) образует простое, т. е. одноэлементное, сигма-множество. Аналогичная ситуация имеет место для всех остальных элементов обоих множеств. Следовательно, преемником множества допустимых начальных состояний является -группа, содержащая 18 одноэлементных сигма-множеств, среди которых по 9 штук содержит одно и то же состояние.
образует простое, т. е. одноэлементное, сигма-множество. Аналогичная ситуация имеет место для всех остальных элементов обоих множеств. Следовательно, преемником множества допустимых начальных состояний является -группа, содержащая 18 одноэлементных сигма-множеств, среди которых по 9 штук содержит одно и то же состояние.
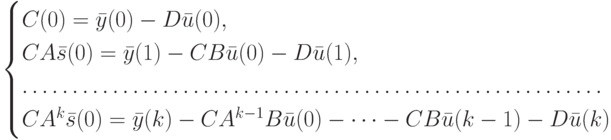
Вернемся теперь к интервальной диагностической задаче. Для нахождения неизвестного начального состояния ![\bar s(0)=[s_1(0), \dots, s_n(0)]'](/sites/default/files/tex_cache/9538a0a4185cb42396668a869bdc0baf.png) по известной ДП
по известной ДП  и наблюдаемой в процессе проведения эксперимента с ЛА выходной последовательности
и наблюдаемой в процессе проведения эксперимента с ЛА выходной последовательности  , сформируем следующую СЛАУ:
, сформируем следующую СЛАУ:
 |
( 20.2) |
Эта система получена на основе формулы полной реакции ЛА для  .
.
Поскольку выходные реакции  представляют собой интервальные вектора, то правые части системы (20.2) также являются интервальными векторами, тогда как матрица системы (20.2) является точной.
представляют собой интервальные вектора, то правые части системы (20.2) также являются интервальными векторами, тогда как матрица системы (20.2) является точной.
В общем случае число уравнений в системе (20.2), которое обозначим через  , может не совпадать с числом неизвестных, равным размерности
, может не совпадать с числом неизвестных, равным размерности  ЛА. Если
ЛА. Если  то, как известно из алгебры, общее решение такой системы представляется с использованием свободных переменных и матрица системы приводится к квадратной. Если
то, как известно из алгебры, общее решение такой системы представляется с использованием свободных переменных и матрица системы приводится к квадратной. Если  , то из факта существования у ЛА диагностической последовательности вытекает существование решения системы (20.2). Последнее означает, что ее ранг равен n и поэтому матрица системы и в этом случае может быть приведена к квадратной.
, то из факта существования у ЛА диагностической последовательности вытекает существование решения системы (20.2). Последнее означает, что ее ранг равен n и поэтому матрица системы и в этом случае может быть приведена к квадратной.
Исходя из сказанного, решение рассматриваемой интервальной диагностической задачи в математическом плане сводится к решению СЛАУ с точной квадратной матрицей и интервальной правой частью.
Представим такую систему в общем виде:
 |
( 20.3) |
где  - матрица, элементами которой являются элементы поля
- матрица, элементами которой являются элементы поля ![GF(p), B=[B_1, \dots, B_n]'](/sites/default/files/tex_cache/6f1cdaa92426cd36c41ed0b81a6a72a6.png) , а каждое
, а каждое  является интервалом или мультиинтервалом (объединением нескольких интервалов).
является интервалом или мультиинтервалом (объединением нескольких интервалов).
Тривиальный способ нахождения всех решений системы (20.3) состоит в замене ее интервальной правой части всевозможными конкретными значениями из соответствующих интервалов и поиска решений получающихся при этом обычных систем линейных уравнений одним из известных методов. Однако такой способ является трудоемким, поскольку ведет к необходимости решения  штук систем, где
штук систем, где

Доказываемая ниже теорема позволяет значительно уменьшить трудоемкость нахождения всех решений системы (20.3).
Предварительно введем следующие обозначения:
![\{e_k\}=
\begin {cases}
0, если i \ne k,
1, если i=k
\end {cases},
k=\overline {1,0}; i=\overline {1,n} ;\\
\underline B=[\underline B_1, \underline B_2, \dots \underline B_n]',](/sites/default/files/tex_cache/811ca6212eb7dbc5721239da702a4a13.png)
где

Теорема 20.1. Пусть  есть решение системы
есть решение системы
 |
( 20.4) |
а  есть решения n штук систем
есть решения n штук систем
 |
( 20.5) |
Тогда решение  системы (20.3) имеет вид
системы (20.3) имеет вид
 |
( 20.6) |
где  т. е.
т. е.  пробегают независимо все значения от 0 до -1, при этом из них точно
пробегают независимо все значения от 0 до -1, при этом из них точно 
Доказательство. Рассмотрим  -ю строку системы (20.3):
-ю строку системы (20.3):
поскольку
Таким образом,  , a
, a  , следовательно,
, следовательно,  , откуда и вытекает справедливость теоремы.
, откуда и вытекает справедливость теоремы.
Из этой теоремы следует, что в действительности для построения всех решений системы (20.3) необходимо решить только  систему линейных уравнений, а не
систему линейных уравнений, а не  систем, как это было в тривиальном способе.
систем, как это было в тривиальном способе.
В качестве примера рассмотрим применение этого метода для решения СЛАУ с точной матрицей и интервальной правой частью.