От жестких роботов к мягким, использование новых материалов
Мягкая робототехника - это быстро развивающаяся область, которая фокусируется на проектировании, разработке и внедрении роботов из мягких, гибких и деформируемых материалов, таких как текстиль, эластомеры, жидкости и гели. Целью мягкой робототехники является создание роботов, которые могут двигаться и взаимодействовать с людьми и окружающей средой гибко и безопасно, не причиняя ущерба.
Если традиционной задачей роботов была точность при минимальной деформируемости конструкционных материалов под нагрузкой, то в мягкой робототехнике используется другой подход, при котором гибкость и деформируемость используемых материалов выступает как ключевое преимущество.
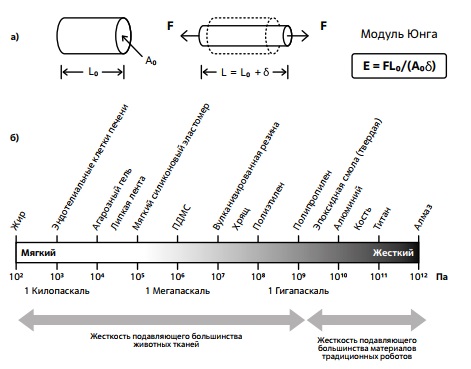
Многие возможности животных объясняются уникальным сочетанием разных по жесткости материалов в их организме. У позвоночных (и людей в частности) наблюдается широкий диапазон свойств материалов от мягких тканей до костей - более восьми порядков изменения величины модуля упругости, что обеспечивает гибкость, деформируемость, пластичность, способность создания плотного контакта при взаимодействии с различными объектами.
Как показано на рис. 7.1 (б), большинство обычных роботов состоят из таких материалов как металлы и твердые пластмассы, которые имеют модуль упругости 1Модуль упругости или модуль Юнга является мерой для сравнения жесткости материалов (физическая величина, характеризующая способность материала сопротивляться растяжению, сжатию при упругой деформации). более одного гигапаскаля (1 Гпа) (см. рис. 7.1). При этом большинство материалов природных организмов, таких как кожа и мышечная ткань, имеют модуль упругости примерно от ста паскалей до одного мегапаскаля. То есть материалы природных организмов на 3-10 порядков менее жесткие, чем материалы обычных роботов 2В данном случае речь идет про мягкие ткани живых организмов .
Источник: [ "Источники использованной литературы" ]
Роботы из жестких материалов могут быть опасны для человека. В частности, мы упоминали опасность нахождения человека рядом с промышленными манипуляторами в плане вероятности нанесения повреждения "мягкому" телу человека со стороны жесткого робота. В этой связи коботы, выполненные с использованием мягких материалов, более дружественны человеку. Большинство мягких роботов имеют меньший вес, чем жесткие, что делает их более подходящими для использования в ограниченных пространствах.
Важным преимуществом мягких роботов является возможность их использования для операций внутри человеческого тела, таких как хирургические вмешательства или диагностика заболеваний. Мягкие медицинские роботы предназначены для безопасного взаимодействия с тканями и органами человека, не причиняя им вреда, например в умных протезах и экзоскелетах. Мягкие медицинские роботы также используются для минимально инвазивных процедур (эндоскопия, лапароскопия 3Лапароскопия представляет собой современный метод хирургии, в котором операции на внутренних органах проводят через небольшие (обычно 0,5-1,5 см) отверстия и катетеризация).
Производство мягких роботов часто оказывается более дешевым за счет использования меньшего числа компонентов, а использование новых материалов позволяет мягким роботам иметь не только гибкость, но и новые свойства за счет использования "умных" мате- риалов, что в свою очередь позволяет реализовать новые механизмы управления и новые виды применений. "Умные" материалы могут реагировать на внешние воздействия (такие как электричество, тепло, магнетизм или свет) в виде изгиба, растяжения или кручения. Благодаря этим способностям данные материалы могут использоваться в качестве приводов для управления мягкими роботами, обеспечивая различные виды движения "мягких машин".
На рис. 7.2 показано несколько типов мягких роботов для вы- полнения таких задач как захват, манипулирование (а, б), передвижение и исследование (в, г). Возможности мягких роботов могут быть значительно расширены за счет использования проприоцептивных и контактных датчиков.
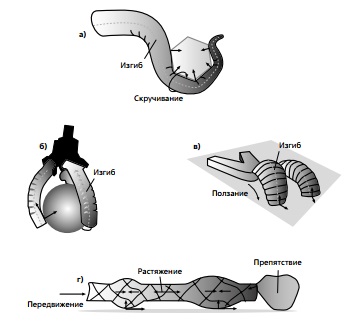
Рис. 7.2. Пример использования мягких роботов для выполнения таких задач как захват, манипулирование, передвижение и исследование
Источник: [ "Источники использованной литературы" ]
С точки зрения областей применения (согласно данным отчета [ "Источники использованной литературы" ]) мягкие роботы используются в четырех основных сегментах - это мягкие захваты, коботы, надувные роботы и экзоскелеты.
Обобщенные схемы классификации роботов
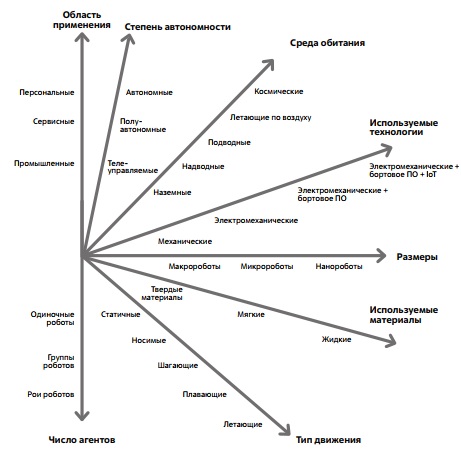
Завершая эту часть курса, следует обобщить информацию по классификации роботов. Для этого можно обратиться к рис. 7.3.
Данный рисунок наглядно показывает, что понятие "робот" и "робототехника" объединяют крайне широкое сообщество машин, которые используют разные технологии, материалы и конструктивные решения, функционируют в разных средах и применяются во многих отраслях народного хозяйства.
Обобщая процесс эволюции роботов, с учетом введенных в данной лекции терминов и понятий, можно привести еще одну иллюстрацию, отображающую процесс развития робототехники (рис. 7.4).

Источник: [ "Источники использованной литературы"
Эволюция идет под влиянием рыночного спроса, и в первую очередь импульс развития получают новации, которые востребованы рынком и требуют ограниченных затрат, то есть не предполагают сложных и затратных технологических решений ( рис. 7.5).
Среди роботов, которые требуют относительно невысоких затрат для создания и при этом имеют высокий рыночный спрос, находятся роботы для уборки и логистические роботы. Последние устройства находят применение для автоматизации складской деятельности и для транспортировки широкого спектра грузов. В среднем более сложными являются роботы, применяемые в сельском хозяйстве. Кроме того, есть специфические области, где необходимы сложные высокотехнологичные аппараты, такие как подводные роботы, которые требуют более существенных затрат для их проектирования и производства.
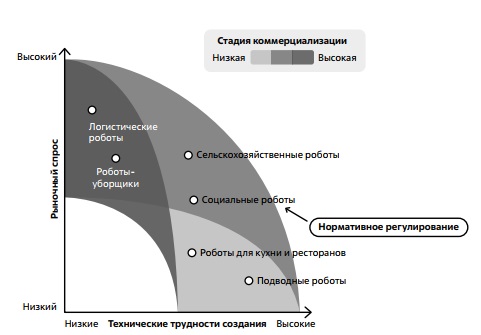
Рис. 7.5. Перспективы внедрения робототехнических решений в зависимости от рыночного спроса и технических трудностей создания
Источник: [ "Источники использованной литературы" ]