|
Возможна ли разработка приложения на Octave с GUI? |
Компания ALT Linux
Опубликован: 12.03.2015 | Доступ: свободный | Студентов: 582 / 64 | Длительность: 20:55:00
Темы: Математика, Программное обеспечение, Физика
Специальности: Математик, Преподаватель, Физик
Лекция 7:
Нелинейные уравнения и системы
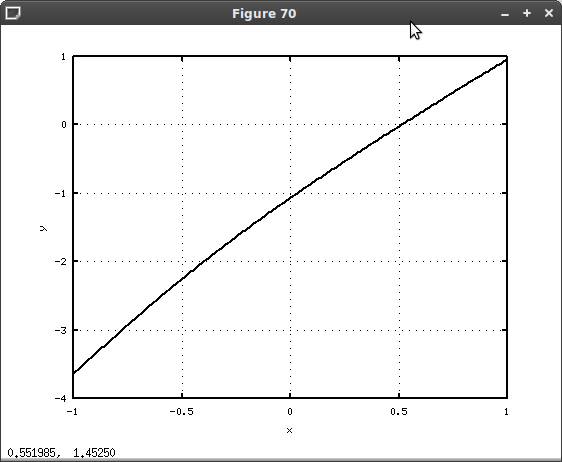
Пример 7.17. Решить систему уравнений:

Проведём элементарные алгебраические преобразования и представим систему в виде одного уравнения: 
Рис. 7.6 содержит графическое решение уравнения (листинг 7.19), к которому сводится система, его удобно использовать для выбора начального приближения функции  . Вторая часть листинга 7.19 содержит решение заданной системы. Здесь значения
. Вторая часть листинга 7.19 содержит решение заданной системы. Здесь значения  вычисляется при помощи функции , а значение y определяется из первого уравнения системы.
вычисляется при помощи функции , а значение y определяется из первого уравнения системы.
% Строим график function y=fun(x) z=sin(x+1)-1.2; y=2-x+cos(z)-2; end; cla; okno1=figure(); x = -1:0.01:1; L=plot(x, fun(x)); set(L, ’LineWidth’, 2, ’Color’, ’k’) grid on; xlabel(’x’); ylabel(’y’); % Находим аналитическое решение системы вблизи x = 0 >>> X=fzero(’fun’, 0) >>> Y=sin(X+1)-1.2 X = 0.51015 Y = -0.20184Листинг 7.19. Графическое и аналитическое решение (пример 7.17).
Решить систему нелинейных уравнений, или одно нелинейное уравнение, в Octave можно с помощью функции  , где
, где  — имя функции, которая определяет левую часть уравнения
— имя функции, которая определяет левую часть уравнения  или системы уравнений
или системы уравнений  (она должна принимать на входе вектор аргументов и возвращать вектор значений),
(она должна принимать на входе вектор аргументов и возвращать вектор значений),  — вектор приближений, относительно которого будет осуществляться поиск решения.
— вектор приближений, относительно которого будет осуществляться поиск решения.
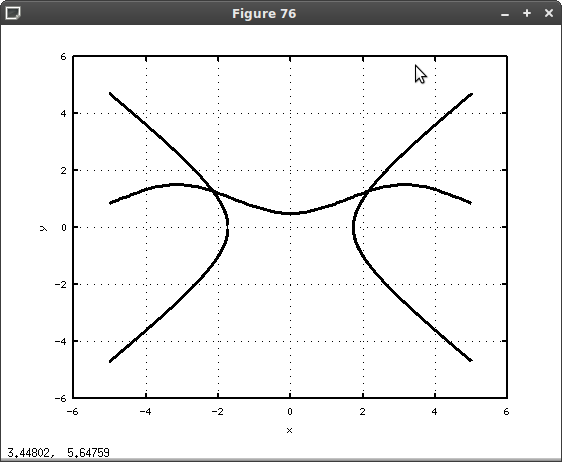
Пример 7.18. Найти решение системы нелинейных уравнений:
Решим систему графически, для чего выполним перечень команд указанных в листинге 7.20. Результат работы этих команд показан на рис. 7.7. Понятно, что система имеет два корня.
% Уравнения, описывающие линии гиперболы function y=f1(x) y=sqrt(x.^2_3); end; function y=f2(x) y=_sqrt(x.^2_3); end; % Уравнение косинусоиды function y=f3(x) y=1_cos(x)/2; end; % Построение графика cla; okno1=figure(); x1 = _5:0.001:_sqrt(3); x2=sqrt(3):0.001:5; x3 = _5:0.1:5; % Гипербола L1=plot(x1, f1(x1), x1, f2(x1), x2, f1(x2), x2, f2(x2)); set(L1, ’LineWidth’, 3, ’Color’, ’k’) hold on % Косинусоида L2=plot(x3, f3(x3)); set(L2, ’LineWidth’, 3, ’Color’, ’k’) grid on; xlabel(’x’); ylabel(’y’);Листинг 7.20. Графическое решение системы (пример 7.18).
Составим функцию, соответствующую левой части системы. Здесь важно помнить, что все уравнения должны иметь вид . Кроме того, обратите внимание, что и  в этой функции — векторы ( — вектор неизвестных, — вектор решений).
в этой функции — векторы ( — вектор неизвестных, — вектор решений).
function[y]= fun(x) y(1)=cos(x(1))+2-x(2)-2; y(2)=x(1)^2/3-x(2)^2/3-1; end;
Теперь решим систему, указав в качестве начального приближения сначала вектор [-3, -1], затем [1, 3].
>>> [X1_Y1]= fsolve(’fun’, [-3 -1]) X1_Y1 = -2.1499 1.2736 >>> [X2-Y2]= fsolve(’fun’, [1 3]) X2_Y2 = 2.1499 1.2736
Понятно, что решением примера являются пары  и
и  , что соответствует графическому решению (рис. 7.7).
, что соответствует графическому решению (рис. 7.7).
Если функция решения нелинейных уравнений и систем имеет вид ![[x, f, ex] = fsolve(fun, x0)](/sites/default/files/tex_cache/d44110e55e415c1f152fb73887bd0963.png) , то здесь — вектор решений системы,
, то здесь — вектор решений системы,  — вектор значений уравнений системы для найденного значения
— вектор значений уравнений системы для найденного значения  — признак завершения алгоритма решения нелинейной системы, отрицательное значение параметра ex означает, что решение не найдено, ноль — досрочное прерывание вычислительного процесса при достижении максимально допустимого числа итераций, положительное значение подтверждает, что решение найдено с заданной точностью.
— признак завершения алгоритма решения нелинейной системы, отрицательное значение параметра ex означает, что решение не найдено, ноль — досрочное прерывание вычислительного процесса при достижении максимально допустимого числа итераций, положительное значение подтверждает, что решение найдено с заданной точностью.
Пример 7.19. Решить систему нелинейных уравнений:
Листинг 7.21 содержит функцию заданной системы и её решение. Обратите внимание на выходные параметры функции  . В нашем случае значения функции для найденного решения близки к нулю и признак завершения
. В нашем случае значения функции для найденного решения близки к нулю и признак завершения  положительный, значит, найдено верное решение.
положительный, значит, найдено верное решение.
function f=Y(x) f(1)=x(1)^2+x(2)^2+x(3)^2-1; f(2)=2-x(1)^2+x(2)^2-4-x(3); f(3)=3-x(1)^2-4-x(2)+x(3)^2; end >>> [x, f, ex]= fsolve(’Y’, [0.5 0.5 0.5] ) x = 0.78520 0.49661 0.36992 f = 1.7571e-08 3.5199e-08 5.2791e-08 ex = 1Листинг 7.21. Решение системы с помощью fsolve (пример 7.19).
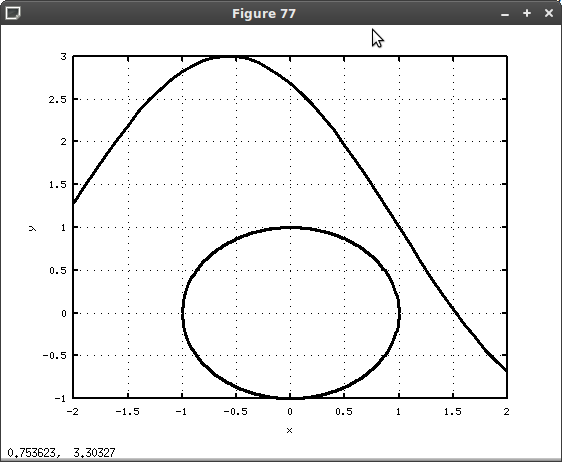
Пример 7.20. Решить систему:

Графическое решение системы (рис. 7.8) показало, что она корней не имеет. Рисунок был получен с помощью команд листинга 7.22.
% Уравнения линий окружности function y=f1(x) y=sqrt(1-x.^2); end; function y=f2(x) y= -sqrt(1-x.^2); end; % Уравнение синусоиды function y=f3(x) y=1-2-sin(x-1); end; okno1=figure(); cla; x1 = -1:0.01:1; x3 = -2:0.1:2; % Окружность L1=plot(x1, f1(x1), x1, f2(x1)); set(L1, ’LineWidth’, 3, ’Color’, ’k’) hold on % Синусоида L2=plot(x3, f3(x3)); set(L2, ’LineWidth’, 3, ’Color’, ’k’) grid on; xlabel(’x’); ylabel(’y’);Листинг 7.22. Графическое решение системы (пример 7.20).
Однако применение к системе функции даёт положительный ответ, что видно из листинга 7.23. Происходит это потому, что алгоритм, реализованный в этой функции, основан на минимизации суммы квадратов компонент вектор–функции. Следовательно, функция в этом случае нашла точку минимума, а наличие точки минимума не гарантирует существование корней системы в её окрестности.
function[y]= fun(x) y(1)=x(1)^2+x(2)^2-1; y(2)=2-sin(x(1)-1)+x(2)-1; end; >>> [ X1_Y1]= fsolve(’fun’, [1 1]) X1_Y1 = 1.04584 0.52342Листинг 7.23. Решение с помощью fsolve (пример 7.20).
Евгений Ветчанин
|
Добрый день. Я самостоятельно изучил курс "Введение в Octave" и хочу получить сертификат. Что нужно сднлать для этого? Нужно ли записаться на персональное обучение с тьютором или достаточно перевести деньги? |