Лекция 3:
Модификации генетических алгоритмов
Контрольные вопросы
- Какие методы применяются для генерации начальной популяции?
- Какая информация используется при отборе родителей?
- Какие недостатки имеет "метод рулетки"?
- Чем отличается ранжирование от пропорционального отбора?
- Что такое локальный отбор?
- Опишите метод турнирного отбора.
- Как используется метод Больцмана при отборе особей?
- Опишите методы отбора пар для скрещивания.
- Что такое неявные методы отбора?
- Опишите двоичную рекомбинацию.
- Чем отличается многоточечный кроссинговер от классического?
- Что такое однородный кроссинговер?
- Чем отличается рекомбинация действительных чисел от классического кроссинговера?
- Что такое дискретная рекомбинация?
- Опишите промежуточную рекомбинацию.
- Чем отличается линейная рекомбинация от промежуточной?
- Что такое инверсия?
- Как выполняется мутация над вещественными числами?
- Чем отличается неоднородная мутация от обычной?
- Какие существуют методы сокращения популяции?
- В каких случаях целесообразно применять генетический микроалгоритм?
- Опишите нестационарный ГА.
- Чем заменяется отбор родителей в нестационарном ГА?
- Какие методы определения сроков жизни вы знаете?
- Что такое ниши в ГА?
- Чем эволюция Ламарка отличается от эволюции Дарвина?
- Опишите гибридный ГА на основе эволюции Ламарка.
- В чем заключается адаптация в ГА?
- Как изменяются вероятности кроссинговера и мутации при адаптации?
- Какие виды адаптации ГА вы знаете?
- Как можно выполнить адаптацию числа особей популяции?
- Как можно выполнить адаптацию значений вероятностей кроссинговера и мутации.
- Опишите адаптивный ГА на основе нечетких контроллеров.
Упражнения
- Разработать программу, использующую ГА для нахождения экстремумов (минимумов) функции, согласно таблице вариантов, приведенной в табл.3.2 Программу выполнить на встроенном языке пакета Matlab.
- Для функций с числом переменных
 вывести на экран график данной функции с указанием найденного экстремума, точек популяции. Для вывода графиков использовать стандартные возможности пакета Matlab. Предусмотреть возможность пошагового просмотра процесса поиска решения.
вывести на экран график данной функции с указанием найденного экстремума, точек популяции. Для вывода графиков использовать стандартные возможности пакета Matlab. Предусмотреть возможность пошагового просмотра процесса поиска решения. - Повторить нахождение решения с использованием стандартного Genetic Algorithm toolbox. Сравнить полученные результаты.
- Исследовать зависимость времени поиска, числа поколений (генераций), точности нахождения решения от основных параметров генетического алгоритма:
- число особей в популяции
- вероятность кроссинговера, мутации.
Критерий остановки вычислений – повторение лучшего результата заданное количество раз или достижение популяцией определенного возраста (например, 100 эпох).
- Повторить процесс поиска решения для
 , сравнить результаты, скорость работы программы.
, сравнить результаты, скорость работы программы.
| № вв. | Название | Оптимум | Вид функции | График функции |
|---|---|---|---|---|
| 1 | De Jong's function 1 | global minimum 
|
 |
|
| 2 | Axis parallel hyper-ellipsoid function | global minimum
|
 |
|
| 3 | Rotated hyper-ellipsoid function | global minimum
|
 |
|
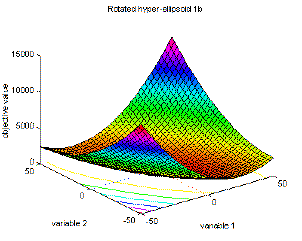
| 4 | Moved axis parallel hyper-ellipsoid function | global minimum 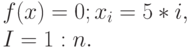
|
 |
|
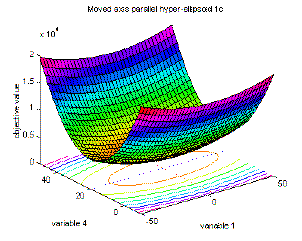
| 5 | Rosenbrock's valley (De Jong's function 2) | global minimum
|
 |
|
| 6 | Rastrigin's function 6 | global minimum
|
 |
|
| 7 | Schwefel's function 7 | global minimum 
|
 |
|
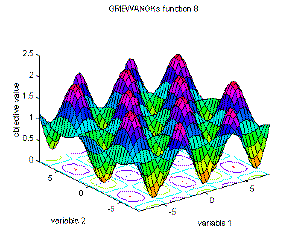
| 8 | Griewangk's function 8 | global minimum
|
 |
|
| 9 | Sum of different power function 9 | global minimum
|
 |
|
| 10 | Ackley's Path function 10 | global minimum 
|
 |
|
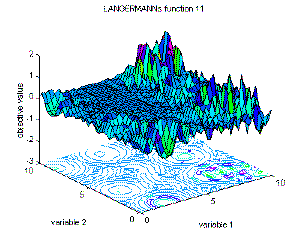
| 11 | Langermann's function 11 | global minimum 
|
 |
|
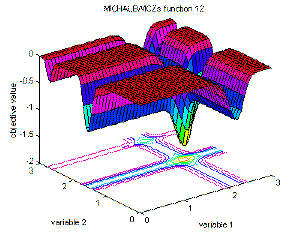
| 12 | Michalewicz's function 12 | global minimum 
|
 |
|
| 13 | Branins's rcos function | global minimum 
|
 |
|
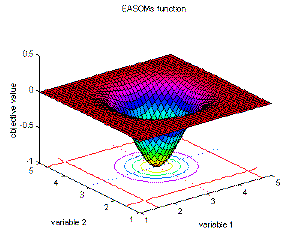
| 14 | Easom's function | global minimum 
|
 |
|
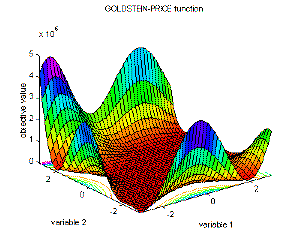
| 15 | Goldstein-Price's function | global minimum 
|
 |
|
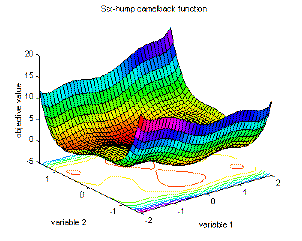
| 16 | Six-hump camel back function | global minimum 
|
 |







Краткие итоги:
- рассмотрены различные модификации и обобщения ГА;
- описаны различные виды отбора родительских особей;
- показаны разные виды кодирования потенциальных решений;
- представлено множество генетических операторов кроссинговера и мутации;
- рассмотрены динамические ГА, где в процессе поиска изменяется мощность популяции;
- определены ГА на основе ниш для мультимодальных функций;
- описаны меметические ГА;
- рассмотрены гибридные ГА;
- представлены ГА на основе моделирования эволюции Ламарка;
- описаны различные виды адаптивных ГА, где при поиске решений изменяются параметры ГА