Применение вариационных принципов для построения разностных схем
Имеем интегро - дифференциальное уравнение для определения  , причем как строить его разностную аппроксимацию — непонятно.
, причем как строить его разностную аппроксимацию — непонятно.
Отметим, что  есть функция Грина для задачи
есть функция Грина для задачи
w'' = - g(s), w'(0) = w(1) = 0.
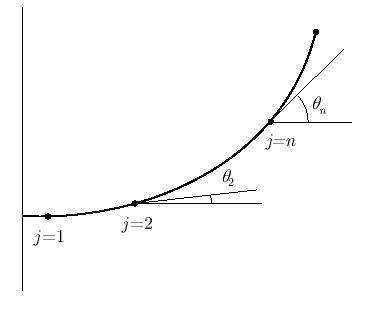
Теперь введем дискретный аналог лагранжиана Lh. Для этого разобьем стержень на n отрезков одинаковой длины  (и одинаковой массы). Каждый отрезок характеризуется углом наклона
(и одинаковой массы). Каждый отрезок характеризуется углом наклона  . Тогда (см. рис. 9.2)
. Тогда (см. рис. 9.2)

Здесь появился аналог конечных элементов или схем с центральными разностями. Интегралы в этом выражении заменены конечными изломами, фактически эти интегралы вычислены методом трапеций, т.е. погрешность в определении лагранжиана Lh есть  .
.
Теперь для построения системы уравнений надо записать

т. е. продифференцировать дискретный аналог функционала по всем значениям  на введенной сетке. Для рассматриваемой задачи
последнее равенство приводит к соотношению
на введенной сетке. Для рассматриваемой задачи
последнее равенство приводит к соотношению

После подстановки в последнее выражение дискретного аналога лагранжиана и
выполнения дифференцирования по всем  ,
получаем:
,
получаем:

(известно, что  по построению).
по построению).
Таким образом, при использовании сеточного аналога вариационного принципа Гамильтона получена дифференциально - разностная система уравнений (дифференциальная по времени, разностная по пространственным переменным).

Несколько затруднительно решать эту систему как систему обыкновенных дифференциальных уравнений, так как она не приведена к нормальной форме Коши. Однако с последней дифференциально - алгебраической системой можно работать и решать ее. Алгоритмы решения основаны на том, что glk — сеточный аналог функции Грина. Обратная матрица — сеточная аппроксимация оператора второй производной. Подробное изложение метода решения в [19.1].