Применение вариационных принципов для построения разностных схем
Вариационный принцип Ритца, позволяющий получить МКЭ для уравнений в частных производных эллиптического типа, в том числе и на нерегулярных сетках, рассматривался в "Понятие о методах конечных элементов" . Далее для решения нестационарных задач в основном использовался проекционный вариант МКЭ (метод Галеркина). Тем не менее, многие задачи математической физики допускают вариационную постановку. Некоторые величины и законы сохранения могут играть особую роль для задач (пример — закон сохранения гамильтониана для консервативной системы). Необходимы разностные схемы (или численные методы), позволяющие учитывать специфику задачи и вариационные постановки.
Сделать это можно двумя способами. Первый — использовать вариационные принципы для дискретных аналогов соответствующих функционалов. При этом обычно получаются консервативные схемы. Второй способ — построение разностных схем обычными методами (конечных разностей), а затем их модификация, направленная на минимизацию погрешности аппроксимации законов сохранения.
Рассмотрим первый (вариационный) подход.
9.1. Пример использования принципа наименьшего действия (Гамильтона)
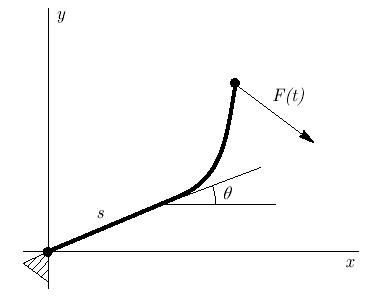
Рассматривается задача о движении твердого нерастяжимого стержня длиной 1. Пусть он закреплен в точке 0, а на другой конец стержня действует сила  (рис. 9.1). Требуется определить движение стержня. Начальная форма стержня
считается заданной.
(рис. 9.1). Требуется определить движение стержня. Начальная форма стержня
считается заданной.
Возможное решение: записать уравнение движения — получится уравнение гиперболического типа; поставить граничные условия; построить разностную схему. Но в задаче допускаются сколь угодно большие колебания стержня.
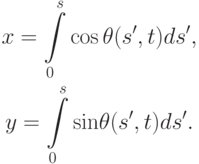
Другой способ приближенного решения. Введем  — угол отклонения от оси x — как функцию длины дуги s, времени t. Тогда имеем
— угол отклонения от оси x — как функцию длины дуги s, времени t. Тогда имеем
Кинетическая энергия стержня есть
![$ T = \int\limits_0^1 {\left({\frac{{V_x^2}}{2} + \frac{{V_y^2}}{2}}\right)ds} = \frac{1}{2} \int\limits_0^1 {\left({\left[{\frac{{\partial}x}{{\partial}t}}\right]^2 + \left[{\frac{{\partial}y}{{\partial}t}}\right]^2}\right)ds}, $](/sites/default/files/tex_cache/236dd08651ca729a4b6fd6f6b79528f9.png)
а потенциальная энергия складывается из упругой энергии (изгиба) и работы
внешней силы :

(соответствующие коэффициенты полагаются равными 1 ).
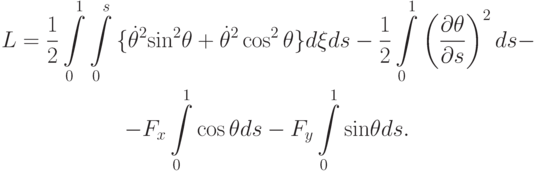
Лагранжиан системы есть L = T - U, так что
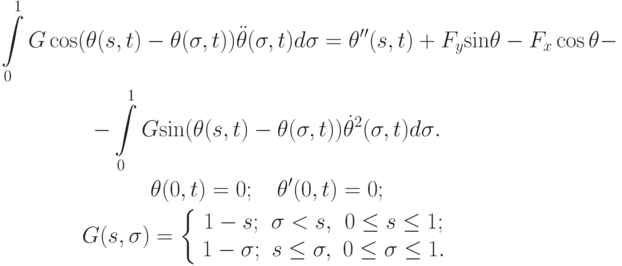
Согласно принципу Гамильтона, функционал действия достигает экстремального значения на истинном движении. Отсюда следует, что
и получается уравнение движения для