Механические сенсоры перемещения. Принципы работы глобальной системы ориентирования и сенсоры GPS
Цель лекции: cформировать у слушателей ясное представление о глобальной системе ориентирования, принципах ее работы и о ее многообразных возможностях, показать роль интеллектуальных сенсоров GPS в современной жизни. Объяснить принцип действия наиболее часто применяемых чувствительных элементов линейного и углового перемещения, указать области их применения. Привести примеры интеллектуальных сенсоров с применением таких чувствительных элементов.
3.1. Механические сенсоры перемещения
Как известно из механики [
[
315
]
], положение тела в пространстве описывается тремя координатами (  ), если его можно представить в виде материальной точки. Эти координаты характеризуют положение центра масс тела. Если же важна еще и ориентация тела в пространстве, то её можно охарактеризовать двумя углами (
), если его можно представить в виде материальной точки. Эти координаты характеризуют положение центра масс тела. Если же важна еще и ориентация тела в пространстве, то её можно охарактеризовать двумя углами (  ), изображенными на
рис.
3.1. Здесь
), изображенными на
рис.
3.1. Здесь  – единичный вектор ориентации тела,
– единичный вектор ориентации тела,  – угол между этим вектором и осью ОZ,
– угол между этим вектором и осью ОZ,  – азимутальный угол.
– азимутальный угол.
В механических сенсорах перемещения первичные сигналы о состоянии исследуемого объекта или процесса возникают в виде изменений координат центра масс тела ( ) или углов поворота тела ( ) относительно некоторой системы координат.

Такие сигналы возникают, в первую очередь, в системах, которые сами перемещаются (вращаются, наклоняются), или в системах, в которых одни узлы либо детали перемещаются относительно других. Например, перемещение свободно парящего в небе воздушного шара (без двигателя) является информационным сигналом о направлении и величине скорости ветра на соответствующей высоте. Перемещение предмета, плывущего с водой и неподвижного относительно неё, является сигналом о направлении и скорости течения на поверхности или на определенной глубине реки, озера, океана. Во многих сферах жизни очень важной сама по себе является информация о местонахождении и перемещении людей, транспортных средств, грузов, животных, узлов машин и других объектов.
На сегодняшний день разработано уже довольно много разнообразных методов получения такой информации. Это – визуальное наблюдение, оптические измерения расстояний и углов, радиолокация, звуковая локация, прохождение мимо расставленных вех и т.п. Они будут рассмотрены в соответствующих разделах. В данной лекции мы ознакомим Вас сначала с одним из выдающихся достижений последних десятилетий в этой области – с глобальной системой ориентирования (Global Positioning System – GPS ).
3.2. Принципы работы глобальной системы ориентирования
Основой этой системы, её "космической составляющей", является совокупность 28 искусственных спутников Земли, которые вращаются вокруг нашей планеты на высоте около 20 тыс. км в семи разных плоскостях по 4 спутника на каждой ( рис. 3.2). Период их обращения составляет приблизительно 12 часов. Эти навигационные спутники несколько раз в секунду передают радиосигналы с информацией о своих точных координатах и текущем моменте времени. Параметры орбит рассчитаны так, что в любой момент времени из любой точки на поверхности Земли видны от 5 до 12 спутников. Для работы системы достаточно было бы видеть 4 спутника и иметь в целом 24 спутника. Дополнительные видимые спутники значительно повышают надежность работы системы и точность определения координат.
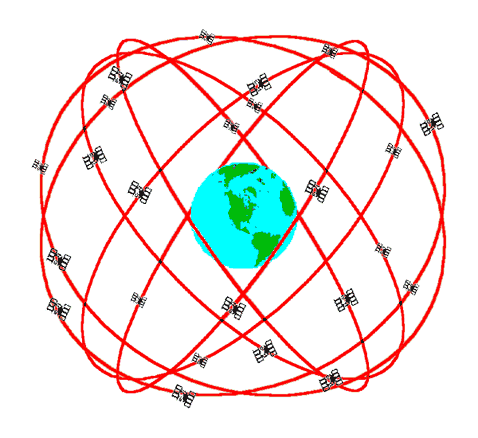
Рис. 3.2. Схема расположения орбит искусственных спутников Земли, которые входят в систему GPS. Каждый рассчитан на 10 лет работы
Совокупность навигационных спутников GPS образно называют "созвездием, искусственно созданным человеком". Система GPS была разработана по заказу Министерства обороны США сначала исключительно для военных применений. В целом на её создание затрачено около 12 млрд. долларов США и несколько десятилетий времени. Первый спутник этой системы был запущен в 1978 году. С 1989 года стали запускать навигационные спутники нового поколения. И лишь со средины 90-х годов ХХ в. система заработала в полную силу. Ныне космическая составляющая системы GPS по-прежнему поддерживается Министерством обороны США, хотя с 2000 г. она открыта и для гражданского использования.
На каждом навигационном спутнике установлены высокоточные эталонные часы (для надежности даже по двое часов разных типов). За синхронизацией и точностью хода всех часов на спутниках GPS и за стабильностью их орбит неустанно следит сеть контрольно-измерительных станций, расположенных по всему земному шару. На каждом спутнике размещены также компьютер, рассчитывающий его точные координаты в момент посылки радиосигнала, и радиопередатчик, работающий в диапазоне частот выше 1 ГГц. В новых моделях навигационных спутников имеется также и двигатель для точной корректировки орбиты. Через достаточно короткие промежутки времени спутник передает в эфир в предусмотренном формате свой номер, показание своих часов и свои текущие координаты. В качестве системы отсчета GPS взяты общепринятые географические долгота и широта, высота над уровнем моря и так называемое "время GPS" – время по эталонным часам.
Благодаря наличию такой системы спутников задача точного определения географических координат объектов на земном шаре значительно упростилась. Для этого достаточно иметь при себе соответствующий интеллектуальный сенсор – так называемый " GPS-приемник " (или " GPS-ресивер" ). В его состав входят многоканальный приемник радиосигналов от спутников GPS, микропроцессор и точные собственные часы, которые отсчитывают время GPS. Конечно, чтобы удовлетворить требования мобильности, портативности и приемлемой стоимости, часы эти проще и не так точны, как используемые на спутниках. Поэтому их небольшая временнaя поправка рассматривается тоже как одна из неизвестных величин.
Получив сигналы от 4-х спутников GPS, микропроцессор определяет времена запаздывания каждого из сигналов, вычисляет соответствующее расстояние до каждого спутника и решает систему из 4-х алгебраических уравнений с четырьмя неизвестными: три пространственные координаты GPS-приемника и временнaя поправка его часов. Вычисленные координаты выдаются пользователю. Если принимаются сигналы более чем от 4-х спутников, то и число уравнений оказывается больше 4-х, что позволяет значительно уменьшить погрешность вычислений, используя алгоритмы минимизации среднеквадратического отклонения. GPS-приемники массового пользования обеспечивают погрешность определения своих географических координат в пределах  10-20 м, а высокоточные GPS-приемники для геодезических измерений – не больше нескольких сантиметров!
10-20 м, а высокоточные GPS-приемники для геодезических измерений – не больше нескольких сантиметров!
Укажем, что в 2001 году Европейская комиссия и Европейское космическое агентство приняли решение о создании собственной системы спутниковой навигации Galileo. Ее космическая часть будет состоять из 30 спутников, которые для массовых потребителей обеспечат точность определения координат до 1 м.
Российская Федерация продолжает развивать свою независимую систему спутниковой навигации ГЛОНАСС, которая сначала тоже была предназначена лишь для военных целей, но теперь станет доступной и для гражданских лиц.