

|
Подскажите пожалуйста а как можно посмотреть на сколько балов сдал экзамен? Я не сфоткал на какой бал написал экзамен. Думал на сертификате будет написанно на сколько сдал написанно. |
Опубликован: 26.05.2010 | Доступ: свободный | Студентов: 1757 / 360 | Оценка: 4.42 / 4.25 | Длительность: 56:51:00
ISBN: 978-5-9963-0124-9
Специальности: Разработчик аппаратуры
Лекция 7:
Интеллектуальные акустические сенсоры для УЗИ. Сенсоры для сейсморазведки. Сенсоры на ПАВ
Аннотация: Рассказано о современных УЗ-сенсорах для измерения расстояний и дефектоскопии металлоизделий, для медицинских УЗ-исследований. Описаны принципы работы сенсоров на поверхностных акустических волнах и метод спектрально-сейсморазведочного профилирования. Приведены примеры применения.
Ключевые слова: спектрально-сейсморазведочное профилирование, поверхностные акустические волны, активный акустический сенсор, эхолокация, УЗ сенсор расстояния, объект, ПО, запаздывания, расстояние, длина, выход, микрокомпьютер, диаграмма, гидролокатор, интеллектуальный акустический сенсор, место, граница раздела, эффект Доплера, УЗ мультидатчики, пьезоэлемент, g.lite, optimum, мышца, harmonic, noise, reduction, edge enhancement, compound, electrical, сейсморазведка, представление, целостность, вес, ССП, ССП сенсоры, акустические волны, группа, ПАВ (поверхностные акустические волны), прямой, обратный, GSM, цифровое телевидение, разделение каналов, сенсоры на ПАВ, микросистемные технологии, нанотехнологии, micro, самоконтролируемые композитные структуры, интеллектуальный сенсор, медицинские УЗ аппараты, радиоидентификация объектов, анализ
Цель лекции: продолжить рассказ о многочисленных применениях активных интеллектуальных акустических сенсоров, показать их роль в современной жизни. Ознакомить слушателей с устройством и возможностями современных медицинских сенсоров для УЗ-исследований и диагностики состояния внутренних органов человека, в т. ч. с "объемной ультрасонографией". Объяснить метод спектрально-сейсморазведочного профилирования и возможности его применения. Раскрыть устройство сенсоров на поверхностных акустических волнах и очертить области их использования.
7.1. УЗ-сенсоры расстояния
В этой лекции мы продолжим рассмотрение активных акустических сенсоров. Одним из применений эхолокации уже не в воде, а в воздухе, является УЗ выявление присутствия объекта в контролируемой зоне и измерение расстояния до него. Особенно важным становится это в сложных условиях густого тумана, задымленности, запыленности и т.п., когда оптические методы "работают" плохо. А для УЗ волн это всё – не помеха. В качестве источника ультразвука чаще всего применяют пьезоэлектрические преобразователи.
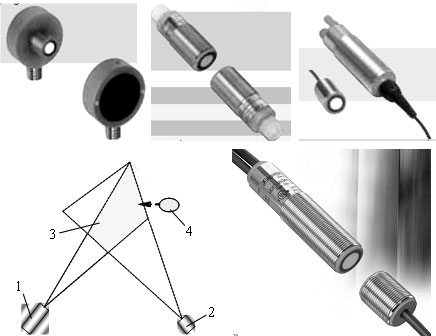
Некоторые типы промышленно выпускаемых УЗ сенсоров расстояния показаны на рис. 7.1.
Излучатель и приемник УЗ волн находятся в одном корпусе вместе с необходимой для измерений электроникой и с элементами, обеспечивающими направленность – концентрацию излучаемых и принимаемых УЗ волн в определенном секторе пространства. УЗ волны с частотой 65–400 кГц в виде кратковременного импульса излучаются в направлении контролируемой зоны 10–200 раз каждую секунду. Если в контролируемой зоне появляется объект, то отраженная или рассеянная от него УЗ волна возвращается назад к сенсору и воспринимается приемником с некоторым запаздыванием. По измеренному времени запаздывания  рассчитывается расстояние до объекта
рассчитывается расстояние до объекта
 |
( 7.1) |
 – скорость распространения ультразвука в воздухе.
– скорость распространения ультразвука в воздухе.Как и в гидролокации, длительность импульсов  определяет минимальное расстояние до объекта, которое можно измерить,
определяет минимальное расстояние до объекта, которое можно измерить,
 |
( 7.2) |
 определяет максимальное расстояние, которое можно измерить
определяет максимальное расстояние, которое можно измерить |
( 7.3) |
От частоты зондирующих УЗ волн  зависит длина волны
зависит длина волны
 |
( 7.4) |
Выпускаются УЗ сенсоры расстояния с разными параметрами, рассчитанными как на небольшие расстояния – от 15 до 200 мм с точностью до 0,2 мм, так и на средние расстояния – от 0,3 до 6 м с точностью до 1 мм, а также на расстояния в десятки метров. Выход таких сенсоров может быть как цифровым, так и аналоговым.
Если в состав УЗ сенсора входит микрокомпьютер, то благодаря встроенным датчикам температуры и давления легко решается вопрос коррекции результатов произведенных измерений с учетом зависимости скорости распространения УЗ волны в воздухе от указанных параметров.
Если частота УЗ колебаний фиксирована, то с помощью таких сенсоров можно определять и скорость движения объекта, измеряя доплеровский сдвиг частоты отраженной волны.
Если угловая диаграмма направленности УЗ сенсора достаточно узка (а это зависит от конструкции корпуса и наличия параболического или сферического рефлекторов) то, постепенно поворачивая его в определенном угловом секторе, можно, как и в гидролокаторах, сканировать УЗ зондом и осматривать более значительную зону пространства.
Для выявления вхождения в контролируемую зону пространства некоторого объекта промышленность выпускает также УЗ сенсоры, состоящие из двух отдельных частей – излучателя и приемника. Некоторые типы таких УЗ сенсоров показаны на рис. 7.2, где слева внизу приведена и общая схема взаимного расположения излучателя 1 и приемника 2.
На рисунке выделена "зона чувствительности" 3, – та часть пространства, в которой перекрываются конус распространения УЗ волн от излучателя и область, из которой УЗ излучение воспринимается приемником 2. Если в этой зоне нет объектов, то сигнал на выходе приемника слабый. Если же какой-либо объект 4 входит в эту зону, то он начинает рассеивать зондирующие УЗ волны, и сигнал на выходе приёмника 2 резко возрастает. По времени запаздывания принятого сигнала относительно излучаемого можно определить, на каком расстоянии в зоне чувствительности 3 находится объект 4, а по изменению частоты колебаний или по изменению положения объекта от одного зондирующего импульса к другому, – с какой скоростью он двигается. Взаимное расположение излучателя 1 и приемника 2 и угол между их осями можно изменять в зависимости от потребности.
На рис. 7.3 приведена фотография УЗ измерителя уровня жидкости в закрытых резервуарах Omni-L. Уровень жидкости определяется с точностью порядка 1 мм по времени запаздывания отраженного от поверхности жидкости УЗ импульса.
Много специализированных интеллектуальных акустических сенсоров созданы и применяются для дефектоскопии металлических заготовок (проката, отливок, ...) и готовых металлоконструкций. В основе их работы тоже лежит принцип эхолокации, но уже в твердых телах. В каких-то местах металлической конструкции возбуждаются УЗ колебания, в других – установлены приёмники УЗ волн. Принятые ими УЗ колебания подвергаются математическому анализу в микрокомпьютере. По результатам анализа можно определить механическое состояние конструкции. Такие специализированные интеллектуальные акустические сенсоры позволяют своевременно обнаруживать трещины, пустоты, посторонние включения и другие дефекты в металлических изделиях, явления "усталости" металлов, нежелательные механические изменения в конструкциях и предотвращать возможные аварии. В случае возникновения повреждений трубопроводов, бесстыковых рельсов сверхскоростных железных дорог и т.д. интеллектуальные УЗ акустические сенсоры позволяют быстро локализовать место повреждения и восстановить функционирование этих важных магистралей.
Глеб Здоровец