Лекция 8: Задача нелинейного программирования при ограничениях – неравенствах. Седловая точка и задача нелинейного программирования. Применение теоремы Куна – Таккера для задачи выпуклого программирования
1. Задача нелинейного программирования при ограничениях – неравенствах
Теорема Куна-Таккера. Рассмотрим случай задачи с ограничениями-неравенствами:
 |
( 1.1) |
 |
( 1.2) |
В точке минимума x+ неравенства gi(x) могут выполняться как равенства или строгие неравенства.
Ограничение gi(x) называется активным в точке x+, если оно выполняется в ней как строгое равенство, то есть если gi(x+)=0
Используя геометрические свойства допустимой
области, найдем
необходимые условия экстремума для задач минимизаци с
ограничениями. Для этого сначала рассмотрим случай, когда все gi(x) линейны. Итак, пусть требуется
найти  при условии
при условии

Здесь каждое ограничение (1.3) определяет полупространство в Rn. Допустимая
область S
задана пересечением m полупространств, определяемых
неравенствами (1.3), и следовательно, является выпуклым
многогранником. Вектор  является нормалью к
гиперплоскости, определяемой уравнением gi(x)=0, и направлен внутрь области S.
является нормалью к
гиперплоскости, определяемой уравнением gi(x)=0, и направлен внутрь области S.
Пусть точка x+ является точкой минимума задачи (1.1) с ограничениями (1.3). Обозначим множество индексов активных ограничений через
 |
( 1.4) |
Например, на рис.8.1
приведен пример минимизации с линейными ограничениями.
Выберем любую допустимую точку x из S.
Вектор x-x+ направлен из x+ внутрь области S.
Такой вектор будем называть входящим. Для этого вектора с учетом
того, что  , можно записать
следующее условие:
, можно записать
следующее условие:

 |
( 1.5) |
 и
и  .
.
Таким образом, входящий вектор x определяет допустимое направление перемещения из точки x+. Но так как f(x) минимальна в точке x+, то при любом x-x+, удовлетворяющем (1.5), будем иметь:
 |
( 1.6) |
Применим теперь теорему, которая есть следствием леммы Фаркаша.
Из условий (1.5), (1.6) на основании леммы Фаркаша следует, что
существует множество неотрицательных скаляров  , для которых
, для которых
 |
( 1.7) |
Отметим, что уравнение (1.7) аналогично (4.15). Если принять,
что  при
при  (то есть
для неактивных ограничений), (1.7) можно переписать в виде
(то есть
для неактивных ограничений), (1.7) можно переписать в виде
 |
( 1.8) |
Кроме того, получим, что
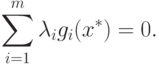 |
( 1.9) |
 ,
а при
,
а при  .
Поэтому уравнения ограничений можно включить в целевую функцию
следующим образом:
.
Поэтому уравнения ограничений можно включить в целевую функцию
следующим образом: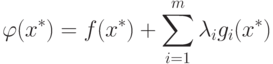 |
( 1.10) |
Следовательно, x+ удовлетворяет следующим условиям:
 |
( 1.11) |
 |
( 1.12) |
При рассмотрении задачи минимизации f(x) при
условиях  может случиться так, что не
будет существовать таких
может случиться так, что не
будет существовать таких  ,
для которых без дополнительных предположений о природе функций
были бы справедливы уравнения (1.9), (1.10), где x+ - оптимальное решение. Эти
дополнительные предположения называют условиями регулярности
ограничений. В частности, в рассмотренном случае, в качестве
таких условий использовали линейную независимость
векторов-градиентов ограничений
,
для которых без дополнительных предположений о природе функций
были бы справедливы уравнения (1.9), (1.10), где x+ - оптимальное решение. Эти
дополнительные предположения называют условиями регулярности
ограничений. В частности, в рассмотренном случае, в качестве
таких условий использовали линейную независимость
векторов-градиентов ограничений  .
.