Активные акустические сенсоры: тонометры, эхолоты, гидролокаторы
6.3. Рыбопоисковые эхолоты
Простейшими и наиболее дешевыми гидролокаторами являются сейчас эхолоты для любителей рыбной ловли. Их называют еще "рыбоискатель" или, на английский манер, "Fishfinder", "флешер" [ [ 159 ] , [ 269 ] ]. Главными функциями рыбопоисковых эхолотов являются определение глубины, рельефа и структуры дна водоема, выявление рыбы и понятное рыбакам отображение этой информации на индикаторе. Такие эхолоты должны быть водостойкими, рассчитанными на работу в жару и в мороз (для зимней рыбалки), портативными, простыми в пользовании. Некоторые из них ориентированы на ловлю рыбы только с лодки. Их акустические антенны крепят снаружи подводной части лодки или внутри лодки к днищу. Тогда они работают сквозь прозрачную для звука обшивку. Другими рыбопоисковыми эхолотами рыбаки могут пользоваться как при ловле рыбы с берега, так и при ловле с лодки.
Акустические антенны в специальных поплавках забрасывают или опускают в воду близ места рыбалки. На зимней рыбалке акустическая антенна может работать и сквозь лед, но лучше все-таки сделать лунку и опустить антенну в воду. На экране эхолота можно увидеть рельеф дна с индикацией глубины, коряги, камни, подводную растительность и, что главное, рыбу. Ее "выдает" главным образом плавательный пузырь. Разность в скорости распространения звука в воздухе и воде настолько велика, что значительная часть звуковых колебаний, достигающих пузыря, рассеиваются в обратном направлении. На экране эхолота хорошо виден, в основном, именно плавательный пузырь рыбы. Настоящую форму рыбы, ее размеры, строение тела эхолот, конечно, показать не может. Поэтому во многих эхолотах сам микрокомпьютер формирует на экране символ рыбы. Пользуясь эхолотом, можно быстрее найти перспективное место рыбалки, можно наблюдать, как рыба реагирует на прикормку и на опущенную рыболовную снасть.
Уже более 10 фирм развитых стран мира промышленно выпускают и продают рыболовецкие эхолоты (Lowrance Electronics, Нumminbird, Garmin, JJ-GROUP, Eagle и т.д.). Одними из самых маленьких, простейших и в то же время удобных в пользовании являются "эхолот-часы" SmartCast RF 35 фирмы Нumminbird ( рис. 6.10).

Их управляющая часть с монохромным жидкокристаллическим экраном, имеющим длину диагонали 32 мм и разрешающую способность 48 x 32 пикселя, размещается в водонепроницаемом корпусе наручных часов (
рис.
6.10, справа) или в таком же небольшом корпусе, рассчитанном на крепление к комлю спиннинга либо удилища (
рис.
6.10, слева). Акустическая антенна вместе с необходимой электроникой, миниатюрным радиопередающим устройством и батарейками питания размещается в поплавке. Как только поплавок попадает в воду, электроника и антенна автоматически включаются, и устанавливается радиосвязь с управляющей частью. Радиосвязь на расстоянии до 50 м обеспечивает значительную мобильность и возможность обследования труднодоступных мест. Антенна формирует один ультразвуковой луч с угловой апертурой 90  , работает на частоте 115 кГц, обеспечивая наблюдение подводного пространства на глубине 30 м при дальности 50 м.
, работает на частоте 115 кГц, обеспечивая наблюдение подводного пространства на глубине 30 м при дальности 50 м.
На экран выводятся глубина водоема, контуры дна, подводных предметов и символы рыбы (если она есть), а также температура воды, измеренная встроенным в поплавок датчиком. Имеется функция звуковой сигнализации в случае появления рыбы в контролируемом пространстве. Ресурс работы акустической антенны со свежими батарейками составляет 500 часов. В "свободное от рыбалки время" управляющая часть эхолота может работать как обычные электронные цифровые часы.
Близкий по характеристикам к описанному, портативный рыбопоисковый эхолот JJ Fisherman 140 показан на рис. 6.11.

Рис. 6.11. Портативный рыбопоисковый эхолот JJ-CONNECT Fisherman 140. Вверху - эхолот в действии во время рыбалки с берега, внизу - общий вид составных частей эхолота
В отличие от предыдущего, связь управляющего блока с акустической антенной осуществляется в нем через тонкий герметичный кабель длиной свыше 6 м. Антенна формирует тоже один луч, но с угловой апертурой 20 градусов. Экран имеет больший размер (44 x 44 мм). Эхолот позволяет видеть, что происходит под антенной в толще воды глубиной от 0,8 м до 24,4 м несколько более детально, чем предыдущий. Но из-за меньшей угловой апертуры он контролирует значительно меньшее подводное пространство.
Совместить более детальное "видение" с одновременным наблюдением за значительным подводным пространством позволяют многопучковые антенны ( рис. 6.12). Такие антенны состоят из нескольких излучателей и приёмников УЗ волн. Каждый канал в них работает независимо и отдельно управляется от микропроцессора.
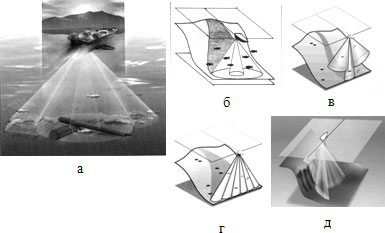
Рис. 6.12,а дает наглядное общее представление о конфигурации УЗ волн, излучаемых многопучковой антенной. На рис. рис. 6.12,б-,г показаны схематические изображения пучков УЗ волн 2-, 3- и 6-пучковой акустических антенн. На рис. 6.12,д показан случай использования одного вертикального и одного или нескольких боковых пучков, которые позволяют "видеть" то, что происходит в воде под крутым нависшим берегом или под скалой.
В качестве примера высококачественного двухпучкового рыбопоискового эхолота рассмотрим эхолот "Matrix 97 sonar", базовый блок которого показан на
рис.
6.13 слева. В нем используется акустическая антенна DualBeam PLUS  ("2-лучевой трансдьюсер"), которая может крепиться к транцу лодки или ко дну внутри лодки и работать сквозь её обшивку. Антенна формирует два пучка УЗ волн вокруг общей вертикальной оси: внутренний пучок с углом расхождения 20 (на уровне – 10 дБ) и с частотой ультразвука 200 кГц и внешний (как на
рис.
6.12,б) – с углом расхождения 60 и с частотой ультразвука 83 кГц. Средняя мощность излучения в импульсе 500 Вт, пиковая 4 кВт. Ее достаточно для того, чтобы контролировать водную толщу до глубины 450 м и на такой глубине различать предметы размером от 65 мм.
("2-лучевой трансдьюсер"), которая может крепиться к транцу лодки или ко дну внутри лодки и работать сквозь её обшивку. Антенна формирует два пучка УЗ волн вокруг общей вертикальной оси: внутренний пучок с углом расхождения 20 (на уровне – 10 дБ) и с частотой ультразвука 200 кГц и внешний (как на
рис.
6.12,б) – с углом расхождения 60 и с частотой ультразвука 83 кГц. Средняя мощность излучения в импульсе 500 Вт, пиковая 4 кВт. Ее достаточно для того, чтобы контролировать водную толщу до глубины 450 м и на такой глубине различать предметы размером от 65 мм.

Рис. 6.13. Базовые блоки рыбопоисковых эхолотов: слева – "Matrix 97 sonar"; справа – WIDE 3D PARAMOUNT
Большой цветной экран с диагональю 142 мм имеет разрешающую способность 240 x 320 пикселей и позволяет на глубине до 12 м различать рыболовный крючок и рыбу размерами от 65 мм. С этим экраном можно уверенно работать даже при ярком солнечном свете. По ходу движения лодки на экране формируется профиль дна и предметов, обнаруживаемых в толще воды. Текущий вертикальный срез виден справа, а слева от него – профиль водного пространства вдоль пройденного пути. Этот профиль по мере продвижения автоматически смещается влево, а справа отображаются свежие данные. На фоне профиля водной толщи отмечается глубина дна, глубина на которой плавает рыба, температура воды и другая важная информация.
Экран может быть программно разделен на несколько отдельных "окон". Например, на
рис.
6.13 слева на экране выделено "окно" с картой соответствующей акватории, на которой отмечается пройденный лодкой маршрут и текущее место пребывания в координатах GPS. Ведь к этому эхолоту могут быть присоединены не только GPS приемник, но и приемник SmartCast, служба сообщений о погоде, персональный компьютер, барометрический и другие датчики. Микропрограммное обеспечение позволяет быстро менять масштаб изображения, "замораживать" и надолго запоминать его, отдельно отображать информацию от каждого из двух пучков, формировать инверсное изображение дна и т.п. Оно же позволяет дополнительно присоединить акустическую антенну бокового обзора ("WideSide " как на
рис.
6.12,д) и 4-пучковую антенну (QuadraBeam ) для УЗ локации водного пространства по курсу лодки.
У эхолота "Humminbird WIDE 3D PARAMOUNT" ( рис. 6.13 справа) – экран монохромный и для выделения деталей используются лишь оттенки серого цвета. Но этот эхолот имеет шесть зондирующих УЗ пучков (как на рис. 6.12,д) с частотами 200 кГц и 455 кГц и благодаря этому в ходе движения лодки может строить на своем экране очень реалистичный трехмерный (3D) профиль дна и водного пространства под лодкой.
Наличие микропроцессора сделало возможным и следующий шаг в усовершенствовании любительских рыбопоисковых эхолотов – переход к так называемым "цифровым технологиям" (фирма Raymarine именует их HDFI). Примером такого более интеллектуального рыбопоискового эхолота стал цифровой эхолот DS500Х фирмы Raymarine ( рис. 6.14).

В эхолотах без такой технологии многие характеристики, установленные при изготовлении, не могут быть изменены в процессе эксплуатации. Это, например, частота УЗ волн, структура, периодичность импульсов и их мощность, частотные характеристики приемника и т.п. Производители, конечно, выбирают их, казалось бы, оптимально, ориентируясь на типовые условия применения. Но на самом деле реальные условия варьируют в широких пределах. И во многих случаях установленные заранее значения оказываются не оптимальными. Слишком мощные УЗ волны нужны, например, лишь для обзора больших глубин в море. В то же время они быстрее разряжают источник питания, создают излишние помехи собственному приемнику, при небольших глубинах и возле дна ухудшают качество картинки на экране. Ухудшает ее и неоптимальная частотная фильтрация. Но ведь можно не фиксировать заранее эти и подобные параметры. "Умный" микрокомпьютер, имеющийся в составе эхолота, может оптимально подбирать их в процессе работы, адаптируясь к конкретным условиям применения. В этом и заключается суть технологии HDFI.
В цифровом эхолоте DS500Х микрокомпьютер автоматически подбирает именно такие мощность УЗ пучка, продолжительность, структуру импульсов и периодичность их излучения, которые лучше всего отвечают конкретным условиям функционирования. С ними автоматически согласовываются работа и чувствительность приемника. Вместо аналогового фильтра применяется цифровая фильтрация, которая адаптируется к текущим обстоятельствам на всех глубинах. Параметры регулируются до тысячи раз в секунду. Адаптивное регулирование позволяет получать качественные данные о рыбе, о структуре дна и обстановке в воде даже в тех условиях, когда неадаптивные эхолоты показывают очень мало или вообще ничего.
Для сравнения на рис. 6.15 изображен один и тот же участок водоема, формируемый на одинаковых экранах: слева – без применения адаптивной цифровой технологии, а справа – с ее применением. Белыми кружками выделены детали картины, на которые стоит обратить внимание.
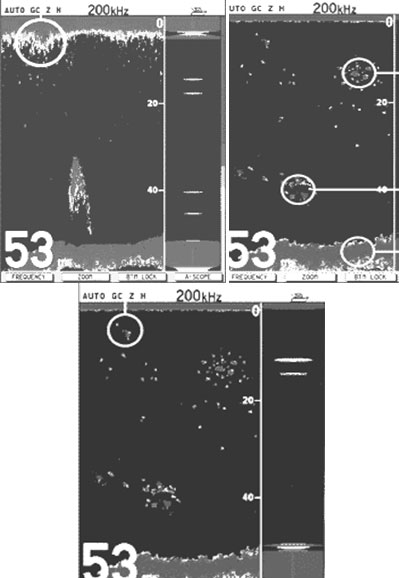
В неадаптивных эхолотах участки возле поверхности воды и на дне забиты помехами и шумами. В адаптивных от этого удается избавиться, благодаря чему можно увидеть рыбу и вблизи поверхности, и вблизи дна, лучше увидеть структуру дна. Намного лучше различаются и объекты в толще воды.
Программное обеспечение интеллектуального рыбопоискового эхолота DS Raymarine "знает" и использует различия в частотно-импульсных характеристиках, присущие живым организмам и безжизненным предметам, сортирует каждый сигнал по 220 параметрам (!) и выделяет сигналы от рыб среди прочих сигналов значительно надежнее, чем в неадаптивных эхолотах. Адаптивным в эхолоте DS Raymarine является даже стиль вывода на экран дополнительной информации. По выбору пользователя, например, данные о температуре воды, глубине, барометрическом давлении, об оценочной массе рыбы (она автоматически вычисляется, исходя из объема плавательного пузыря) и т.п., могут выводиться на экран эхолота не в виде сухих цифр, а в виде изображений соответствующих классических аналоговых приборов с текущими показаниями ( рис. 6.16). Как оказалось, многим рыбакам это значительно удобней для восприятия.
Краткие итоги
К числу активных акустических сенсоров принадлежат тонометры, гидролокаторы, эхолоты. К настоящему времени разработаны удобные высококачественные интеллектуальные тонометры, полуавтоматические и автоматические. Они измеряют не только артериальное давление, но и частоту пульса, выявляют сердечные аритмии, могут накапливать и обрабатывать данные измерений за длительный период, напоминать звуковым сигналом и значками на дисплее о необходимости приема лекарства, очередного измерения артериального давления и оказывать другие сервисные услуги.
Еще более активными акустическими сенсорами являются эхолокаторы, которые сами генерируют акустические волны для того, чтобы собрать нужную информацию о контролируемых объектах. Для эхолокации обычно используют УЗ волны. Эхолокацию в водной и иной жидкой среде принято называть гидролокацией. Гидролокатор состоит из акустической антенны, генератора импульсов мощных УЗ волн, приёмника отраженных УЗ сигналов, коммутатора, электроники обработки сигналов, индикатора и клавиатуры управления. Работой гидролокатора автоматически управляет микропроцессор. Акустическая антенна чаще всего является подвижной, что позволяет с высоким разрешением "прослушивать" все окружающее водное пространство или выбранный сектор. Гидролокаторы позволяют дистанционно наблюдать подводную обстановку, обнаруживать подводные объекты, определять их координаты и расстояния до них, оценивать их размеры. Гидролокаторы применяют на кораблях для обеспечения безопасности движения, на рыболовных судах для обнаружения рыбы, при поисках затонувших кораблей, самолетов и других объектов, для наблюдений за состоянием подводных сооружений, исследований шельфа морского и океанического дна и т.д.
В последние десятилетия созданы и широко используются такие интеллектуальные акустические сенсоры, как портативные эхолоты для любителей рыбной ловли. Главными функциями таких эхолотов являются определение глубины, рельефа и структуры дна водоема, выявление рыбы и понятное рыбакам отображение этой информации на индикаторе. Пользуясь рыбопоисковым эхолотом, можно быстрее найти перспективное место рыбалки, наблюдать реакцию рыбы на прикормку и на опущенную рыболовную снасть. На экране эхолота хорошо виден плавательный пузырь рыбы. Символы рыб на экране формирует микрокомпьютер. Наличие микропроцессора сделало возможным переход к так называемым "цифровым технологиям" эхолокации. Микрокомпьютер автоматически подбирает именно такие мощность УЗ пучка, продолжительность, структуру импульсов и периодичность их излучения, которые лучше всего отвечают конкретным условиям функционирования. С ними автоматически согласовываются работа и чувствительность приемника. Вместо аналогового фильтра применяется цифровая фильтрация, которая адаптируется к текущим обстоятельствам на всех глубинах. Адаптивное регулирование позволяет получать значительно более качественные данные о рыбе, о структуре дна и обстановке в воде.
Чтобы совместить более детальное "видение" подводной обстановки с одновременным наблюдением за значительным подводным пространством, применяют многопучковые акустические антенны. Такие антенны состоят из нескольких излучателей и приёмников УЗ волн. Каждый канал в них может работать независимо и отдельно управляется от микропроцессора. Боковые пучки позволяют "видеть" то, что происходит в воде под крутым нависшим берегом или под скалой. Пучки с более высокой частотой УЗ волны обеспечивают более высокую разрешающую способность, а с более низкой частотой позволяют "видеть" дальше.