|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Донецкий национальный технический университет
Опубликован: 15.03.2007 | Доступ: свободный | Студентов: 6431 / 2419 | Оценка: 4.11 / 3.78 | Длительность: 12:32:00
Специальности: Математик
Лекция 12:
Компьютерное моделирование и решение нелинейных уравнений
Аннотация: В лекции рассматриваются методы моделирования систем, в которых входные переменные являются функциями от времени или каких-либо других параметров.
Ключевые слова: динамическая система, моделирование, Построение математической модели, дифференциальное уравнение, интегрирование, решение дифференциального уравнения, определенный интеграл, функция, интеграл, первообразная, Приращение, геометрический смысл определенного интеграла, многочлен, разность, прямой, метод прямоугольников, метод трапеций, метод Симпсона, узловой, парабола, производная функции, обыкновенное дифференциальное уравнение, уравнениями в частных производных, частное решение, задача Коши, методы Рунге - Кутта, метод Эйлера, интегрирование дифференциального уравнения, вторая производная, модифицированный метод Эйлера, методы Рунге-Кутты, разделенные разности, численное решение уравнений, порядок дифференциального уравнения
Динамические системы - это системы, в которых входные переменные являются функциями от времени или каких-либо других параметров. Описываются эти системы дифференциальными и интегральными уравнениями. Например, большая часть законов механики, электротехники, теории упругости, теории управления и т.д. описываются с помощью дифференциальных уравнений.
На практике динамические системы встречаются очень часто. Моделирование систем, связанных с движением тел, с расчетом потоков энергии, с расчетом потоков материальных ресурсов, с расчетом оборотов денежных средств и т.д. в конечном счете, сводится к построению и решению дифференциальных уравнений (как правило, II-го порядка).
Прямолинейное движение тела, движущегося под действием переменной силы  ,где S=S(t), описывается дифференциальным уравнением второго порядка в форме уравнения Ньютона:
,где S=S(t), описывается дифференциальным уравнением второго порядка в форме уравнения Ньютона:

где
m - масса тела,
S - перемещение тела,
 -линейная скорость,
-линейная скорость,
 -линейное ускорение.
-линейное ускорение.
При этом задаваемые начальные условия

Вращательное движение тела под действием крутящего момента  , где
, где  , описывается аналогично
, описывается аналогично

Где
Iр - полярный момент инерции тела,
 -угол поворота,
-угол поворота,
 - угловая скорость,
- угловая скорость,
 - угловое ускорение.
- угловое ускорение.
При построении математических моделей систем, машин, механизмов с учетом колебаний, возникающих в них, также необходимо построить и решить дифференциальное уравнение, т.к. все виды колебаний (свободные гармонические, вынужденные) также описываются дифференциальными уравнениями.
На практике лишь небольшое число дифференциальных уравнений допускает интегрирование в квадратурах. Еще реже удается получить решение в элементарных функциях. Поэтому большое распространение при решении математических моделей с помощью ЭВМ получили численные методы решения дифференциальных уравнений.
Нахождение определенного интеграла в процессе моделирования объектов процессов или систем может применяться в следующих задачах:
- Определение пути при переменной скорости:

- Нахождение скорости при переменном ускорении:

- Определение моментов инерции тел:
- Нахождение работы переменной силы:

- При решении дифференциальных уравнений.
Найти интеграл этой функции на участке [a,b], т.е. найти
Если подынтегральная функция f(x) задана в аналитическом виде;
если функция f(x) непрерывна на отрезке [a,b] ;
если известна ее первообразная, т.е.
![F'(x)=f(x), x \in [a,b],](/sites/default/files/tex_cache/40fe3cc48c6baf1049b874aa636cd9c3.png)
то интеграл может быть вычислен по формуле Ньютона-Лейбница как приращение первообразной на участке [a,b], т.е.
Но на практике формула Ньютона-Лейбница для вычисления интеграла используется редко. Численные методы интегрирования применяются в следующих случаях:
- подынтегральная функция f(x) задана таблично на участке [a,b] ;
- подынтегральная функция f(x) задана аналитически, но ее первообразная не выражается через элементарные функции;
- подынтегральная функция f(x) задана аналитически, имеет первообразную, но ее определение слишком сложно.
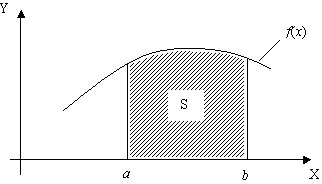
В численных методах интегрирования не используется нахождение первообразной. Основу алгоритма численных методов интегрирования составляет геометрический смысл определенного интеграла. Интеграл численно равен площади S криволинейной трапеции, расположенной под подынтегральной кривой f(x) на участке [a,b] (рис.12.1).
Суть всех численных методов интегрирования состоит в приближенном вычислении указанной площади. Поэтому все численные методы являются приближенными.
При вычислении интеграла подынтегральная функция f(x) аппроксимируется интерполяционным многочленом. На практике чтобы не иметь дело с многочленами высоких степеней, весь участок [a,b] делят на части и интерполяционные многочлены строят для каждой части деления.
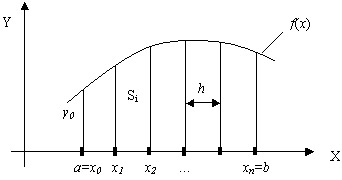
Порядок вычисления интеграла численными методами следующий (рис.12.2):
- Весь участок [a,b] делим на n равных частей с шагом h=(b-a)/n.
- В каждой части деления подынтегральную функцию f(x) аппроксимируем интерполяционным многочленом. Степень многочлена n = 0,1,2:
- Для каждой части деления определяем площадь частичной криволинейной трапеции.
- Суммируем эти площади. Приближенное значение интеграла I равно сумме площадей частичных трапеций
Нахождение приближенного значения интеграла называется квадратурой, а формулы для приближенного вычисления интеграла - квадратурными формулами или квадратурными суммами.
Разность R между точным значением интеграла и приближенным значением называется остаточным членом или погрешностью квадратурной формулы, т.е.
Если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом нулевой степени, т.е. прямой, параллельной оси OX, то квадратурная формула называется формулой прямоугольников, а метод - методом прямоугольников.
Если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом первой степени, т.е. прямой, соединяющей две соседние узловые точки, то квадратурная формула называется формулой трапеций, а метод - методом трапеций.
Если в каждой из частей деления интервала [a,b] подынтегральная функция аппроксимируется многочленом второй степени, то квадратурная формула называется формулой Симпсона, а метод - методом Симпсона.
Равиль Султанов