Лекция 4: Параллельные и сетевые технологии решения задач линейного программирования
Предпосылки методов
Задачи линейной и нелинейной оптимизации, сетевые транспортные задачи — задачи высокой сложности, подверженные "проклятию размерности". Ориентация на применение многопроцессорных симметричных вычислительных систем в составе персональных компьютеров или рабочих станций (параллельные вычисления) и на применение сетевых технологий (распределенные вычисления) требует разработки новых параллельных методов их решения. Эти методы должны быть лишены недостатков "традиционных" методов: последовательного характера вычислений и введения дополнительных переменных (для задач линейного программирования). Анализ способов распараллеливания показывает эффективность распараллеливания "по информации". Весьма перспективной поэтому становится SPMD-технология программирования ( Single Program — Multiple Data ). При этой технологии вычислительный процесс строится на основе единственной программы, запускаемой на всех процессорах вычислительной системы или на многих станциях локальной сети. Копии программы могут выполняться по разным ветвям алгоритма, обрабатывая подмножества данных. Неизбежна синхронизация во времени и при обработке общих данных.
Такая технология параллельного программирования и обусловила разработку рассмотренных ниже методов. В то же время не отрицаются известные традиционные методы, сокращающие общее число операций и исключающие перебор. Иной методологический подход открывает дорогу решению задач большой размерности и эффективной параллельной работе многих процессоров. Для ряда задач этот подход еще нуждается в исследовании, уточнении области применения и развитии — проведении тщательной математической экспертизы. Поэтому мы посчитали необходимым осветить его подробно — для лучшего представления "физического смысла", ощутимости пространственной модели задач и следующих из этого планов их параллельного решения.
Метод прямого перебора при решении задачи линейного программирования
Графический метод решения и его обобщение
Рассмотрим пример
z=c1x1+c2x2=2x1+5x2-> max (4.1)
при ограничениях
q1=x1<= 40
q2=x2<= 30
q3=x1+x2<= 50
и условиях x1 >= 0, x2 >= 0.
Каждое ограничение в двухмерном пространстве, n=2, определяет полуплоскость. Их пересечение образует многоугольник R (рис. 4.1). Его грани — прямые, получены на основе ограничений, в которых неравенства заменены равенствами.
q1 = 40
q2 = 30 (4.2)
q3 = 50
Эти равенства образуют уравнения границ или просто границы R.

Этот многоугольник (выпуклый многогранник; выпуклый, — ибо он остается по одну сторону от любой прямой, проходящей через его ребро) представляет собой допустимое множество решений R задачи ЛП.
Выберем произвольное значение, например, z=100 целевой функции. Прямая 2x1+5x2=100 показана на рисунке. Она пересекает ось x1 в точке x1=50 и ось x2 в точке x2=20.
Отметим, что для  .
.
Т.к. dx1 и dx2 принадлежат прямой z, то скалярное произведение двух векторов, которое здесь изображено, равно нулю в том случае, если вектор (c1, c2) =(2, 5) перпендикулярен прямой z.
Увеличиваем значение z, передвигая (с помощью линейки) прямую — целевую — функцию параллельно самой себе в сторону ее возрастания вдоль вектора (2, 5) до тех пор, пока линейка не коснется последней возможной точки многогранника. R. Это значение z и будет максимальным. В данном случае — это точка A = (x1=20, x2=30).
Сделаем важное замечание относительно многогранника R.
- То, что он выпуклый, мы заметили ранее.
-
Нам были заданы три ограничения, отсекающие полуплоскости, но определившие не все границы многогранника R. С "не закрытой" ими стороны область R оказалась закрытой условиями неотрицательного решения задачи: x1 >= 0, x2 >= 0. Значит, эти выражения пришлось из ранга условий перевести в ранг ограничений.
При этом не все условия могут быть переведены в ограничения. В нашей задаче могло существовать некоторое ограничение q4 (на рисунке пунктиром), которое бы определяло границу R слева, исключая границу x1 = 0. При этом граница x2 = 0 внизу осталась бы.
- Другое важное замечание: решение задачи мы нашли на границе многогранника R.
При этом возможны варианты:
- Единственному конечному решению соответствует вершина R, как в нашем примере.
- Решением может являться бесконечное множество точек на грани R, например, если бы ограничение q3 определяло бы прямую, параллельную z (уравнения q3 и z были бы линейно зависимыми).
- Система ограничений может определять "открытый" многогранник R, включающий бесконечно удаленные точки, в которых достигается max
z, т.е.
 . Например, та же задача ЛП могла
быть поставлена
при отсутствии ограничений q2 и q3 (
рис. 4.2).
Перемещение z в
сторону ее увеличения может быть бесконечным, т.е.
. Например, та же задача ЛП могла
быть поставлена
при отсутствии ограничений q2 и q3 (
рис. 4.2).
Перемещение z в
сторону ее увеличения может быть бесконечным, т.е.  . Но
если бы была поставлена задача z -> min, то она бы при этих
ограничениях имела конечное и единственное решение, в данном случае x1=x2=0.
. Но
если бы была поставлена задача z -> min, то она бы при этих
ограничениях имела конечное и единственное решение, в данном случае x1=x2=0.
Значит, имеет значение, с какой стороны многогранник R открыт: либо он позволяет поиск решения вдоль "закрытых" стенок, либо допускает возможность "выпасть" за его пределы, искать решение в бесконечности.
Тогда, как бы мы могли искать решение нашей первоначально поставленной задачи ЛП?
Учитывая, что решение задачи — в одной из вершин R, мы сначала выпишем уравнения всех прямых, ограничивающих R, т.е. уравнения всех его границ:
x1 = 40
x2 = 30
x1 + x2 = 50
x1 = 0
x2 = 0
Для нахождения координат каждой вершины R решаем совместно пару уравнений прямых, образующих эту вершину, и находим значение z в найденной вершине:
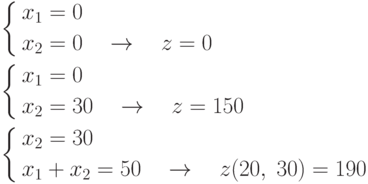
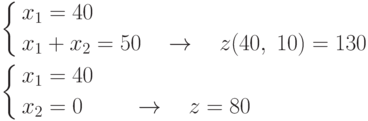
Действительно, max z = 190 достигается в точке A.
Отметим возможноcть распараллеливания решения задачи на многопроцессорной ВС, точнее, ВС SPMD-технологии.
В трехмерном пространстве ограничения и условия образуют пространственный многогранник R, охваченный плоскостями-границами, записанными на основе ограничений и условий, где неравенства заменены равенствами, а каждая плоскость z = const, среди которых мы ищем решение, пересекает, "прорезает" его, деля на две части ( рис. 4.3).

На рисунке иллюстрируется задача ЛП:
z=c1x1+c2x2+c3x3-> max
при ограничениях
q1=a11x1+a12x2+a13x3<= b1
q2=a21x1+a22x2+a23x3<= b2
и при условии
x1>= 0, x2>= 0, x3>= 0.
Две грани q1=b1 и q2=b2, ограничивают многогранник R — область возможных значений переменных сверху (спереди) и справа. Слева, внизу и сзади пространственный многогранник R ограничен условиями неотрицательности решения, ставшими ограничениями x1 = 0, x2 = 0, x3 = 0. Плоскость z=const пересекает многогранник R. Перемещая плоскость z параллельно себе, т.е. вдоль вектора (c1, c2, c3), в сторону возрастания значений линейной формы z, мы находим решение. Здесь наглядно показана очевидность того, что решение следует искать в вершинах R.
Однако графическое представление уже в трехмерном пространстве затруднительно, в n -мерном пространстве нам необходимо действовать формально. Здесь существует ряд проблем.
Во-первых, мы не представляем пространственной картины и не знаем, охватывают ли заданные ограничения область R со всех сторон и какими условиями эти ограничения должны быть дополнены без противоречий.
Во-вторых, мы не знаем, какие n ограничений, дополненных условиями, соответствуют каждой конкретной вершине многогранника R, чтобы найти координаты этой вершины и найти в ней значение целевой функции z. Значит, мы должны испытать все возможные комбинации по n (в данном случае — тройки) ограничений и условий, т.е. все возможные комбинации по три, составленные на основе всех потенциальных границ- ограничений и условий.
Тогда при построении (параллельной!) вычислительной процедуры мы должны опираться на то, что любая противоречивость в системе ограничений (в их состав мы включили теперь и условия) выразится в неразрешимости системы трех уравнений, составленной для нахождения координат очередной испытываемой вершины R. Т.е. в этом случае вершина находится в бесконечности или содержит отрицательные значения координат. Эта неразрешимость находится в процессе счета.
Оставаясь в области практических решений задач ЛП, т.е. в области
инженерии и экономики, примем предположение, что задача
сформулирована корректно. Под этим будем предполагать, что ограничения
выбраны так, что она не имеет неограниченного решения  .
.
Например, ставя задачу о максимизации прибыли от перевозки, не надо забывать о том, что объем перевозок ограничен ресурсами страны, сообщества и т.д. В противном случае мы получим тривиальное решение: чем больше, тем лучше.
Значит, мы будем предполагать, что в многограннике R обязательно есть вершины (их координаты не отрицательны), в целом ограничивающие области изменения переменных, и хотя бы в одной из этих вершин целевая функция — линейная форма z принимает максимальное значение.
В свете сказанного будем также считать, что ограничения не
противоречивы. Противоречивые ограничения приводят к случаю  .
.
Например, ограничения
x + y >= 5
x + y <= 2
противоречивы.
Тогда, развивая на n -мерное пространство, мы можем реализовать следующую стратегию поиска решения задачи ЛП.