| Россия, Волгоградская область |
Инспектор
Вы можете этот курс.
Опубликован: 10.10.2014 | Уровень: для всех | Доступ: платный | ВУЗ: Московский государственный университет путей сообщения
Лекция 3:
Модификации генетических алгоритмов
3.11 Адаптивные генетические алгоритмы
В последние годы проведено достаточно много исследований в этом направлении, когда в основном рассматриваются два вида адаптации:
- Адаптация к проблеме;
- Адаптация к процессу эволюции.
Разница между ними в том, что первая модифицирует некоторые компоненты ГА, такие как вид представления особи, кроссинговер, мутация и отбор. Естесственно, для удачного выбора или модификации компонентов необходимо понимать суть решаемой задачи. Во втором виде адаптации предлагается способ настройки значений параметров и конфигурации ГА в процессе решения задачи. Следуя [15, 16] последний вид адаптации можно разбить на следующие классы:
- адаптация параметров установки;
- адаптация генетических операторов;
- адаптация отбора;
- адаптация представления решения;
- адаптация фитнесс-функции.
Из этих видов в последние десять лет исследовались различные способы адаптации параметров, таких как вероятности кроссинговера и мутации, мощность популяции, которые играют решающую роль в балансе расширения и эксплуатации пространства поиска решений. Ключевым вопросом является выбор значений параметров для эффективного решения данной проблемы. Обычно в простом ГА используются фиксированные значения параметров, которые находятся методом проб и ошибок. Поскольку сам ГА является динамическим и адаптивным процессом, то фиксированные значения параметров противоречат самому духу эволюции. Поэтому возникла естественная идея попробовать изменять значения параметров в процессе поиска решения. Это можно сделать различными способами:
- применять некоторые правила;
- использовать обратную связь в виде информации о текущем состоянии поиска;
- внедрить некоторый механизм самоадаптации.
В работах [15,17] представлен обзор используемых на текущий момент методов адаптации в ГА, в котором выделены три основные категории.
- Детерминированная адаптация, где значение параметра изменяется по некоторому детерминированному правилу. Например, вероятность мутации уменьшается в соответствии со следующей формулой:
 , где
, где  – номер текущего поколения (итерации) и
– номер текущего поколения (итерации) и  – максимально допустимое число поколений. Согласно этому правилу вероятность мутации уменьшается от 0.5 до 0.3 при росте номера поколения эволюции.
– максимально допустимое число поколений. Согласно этому правилу вероятность мутации уменьшается от 0.5 до 0.3 при росте номера поколения эволюции. - Адаптивная адаптация, которая имеет место при наличии некоторой формы обратной связи с процессом эволюции и используется для определения направления изменения параметра. Одним из первых примеров является "правило успеха 1/5" Решенберга в эволюционных стратегиях (см. раздел 9.1) для определения коррекции шага мутации. Правило гласит, что если доля успешных мутаций (дающих улучшение решения) больше 1/5, то шаг мутации можно увеличить, в противном случае этот шаг следует уменьшить. Известны примеры адаптивных фитнесс-функций [18], адаптивного механизма поиска соотношения между значениями вероятностей кроссинговера и мутации [19] и т.п.
- Самоадаптация, где значения параметров также эволюционируют в процессе поиска решений. При этом значения параметров кодируются и включаются в хромосомы особей, но не учитываются при вычислении значений фитнесс-функции.
3.11.1. Адаптация мощности популяции
Отметим, что изменение мощности популяции между двумя соседними поколениями прежде всего влияет на функционирование оператора отбора. Пусть  и
и  обозначают мощность популяции текущего и последующего поколения соответственно. Отбор особей можно рассматривать как повторяющийся процесс операторов отбора с вероятностью
обозначают мощность популяции текущего и последующего поколения соответственно. Отбор особей можно рассматривать как повторяющийся процесс операторов отбора с вероятностью  для
для  -ой особи. Для большинства методов отбора, таких, как например, пропорциональный или турнирный отбор с замещением, вероятность выбора остается неизменной при выполнении операторов. Тогда ожидаемое количество копий -ой особи можно выразить как
-ой особи. Для большинства методов отбора, таких, как например, пропорциональный или турнирный отбор с замещением, вероятность выбора остается неизменной при выполнении операторов. Тогда ожидаемое количество копий -ой особи можно выразить как  , где
, где  – число копий -ой особи в поколении . Ожидаемое количество копий -ой особи прямо пропорционально мощности популяции следующего поколения. Таким образом, долю в популяции особей, связанных с -ой особью после отбора можно выразить следующим выражением:
– число копий -ой особи в поколении . Ожидаемое количество копий -ой особи прямо пропорционально мощности популяции следующего поколения. Таким образом, долю в популяции особей, связанных с -ой особью после отбора можно выразить следующим выражением:

которое не зависит от размера следующей популяции на том основании, что изменение мощности популяции несущественно влияет на значение вероятности . Отметим, что ГА, где мощность популяции уменьшается с ростом поколения, имеет большую начальную и меньшую конечную популяцию. Это повышает эффективность ГА, поскольку большая начальная популяция покрывает большее подпространство поиска, а в конце процесса, когда найдена "зона интереса", для сходимости к оптимуму достаточно и небольшого количества особей в популяции
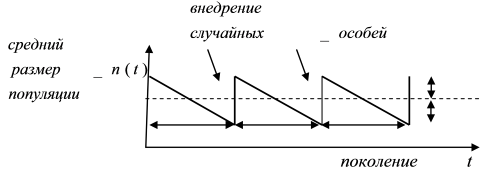
Основываясь на этих предположениях, был предложен так называемый пилообразный ГА [20], где изменение мощности популяции комбинируется с реинициализацией, которая выполняется для улучшения характеристик ГА. При этом среднее значение мощности популяции  по периоду соответствует постоянной популяции ГА с той же вычислительной сложностью. Кроме этого, закон изменения мощности популяции характеризуется амплитудой
по периоду соответствует постоянной популяции ГА с той же вычислительной сложностью. Кроме этого, закон изменения мощности популяции характеризуется амплитудой  и периодом
и периодом  . В этой нотации размер популяции изменяется следующим образом:
. В этой нотации размер популяции изменяется следующим образом:

На рис.3.22 представлен пример пилообразного изменения мощности популяции.