|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Лекция 9:
Компьютерное моделирование и решение линейных и нелинейных многомерных систем
На третьем шаге прямого хода (к=3) из системы (9.7) находим x3.
 - ведущий элемент системы (9.7).
- ведущий элемент системы (9.7).
Если  , то из первого уравнения системы (9.7) имеем:
, то из первого уравнения системы (9.7) имеем:
 |
( 9.8) |
где

Подставив выражение (9.8) для x3 во второе уравнение системы (9.7) получим:
 |
( 9.9) |
где

На последнем шаге прямого хода, если  то из уравнения (9.9) имеем:
то из уравнения (9.9) имеем:
 |
( 9.10) |
где
 |
( 9.11) |
В результате выполнения всех шагов прямого хода исходная система (9.1) приводится к системе треугольного вида, полученной объединением уравнений (9.4), (9.6), (9.8), (9.10):
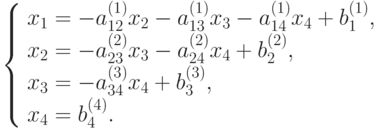 |
( 9.12) |
При построении алгоритма прямого хода вычисление организуем в цикле по шагам, т.е.  .
.
Последний n-й шаг прямого хода выведем из цикла т.к. здесь реализуется только одно вычисление
 |
( 9.13) |
В процессе выполнения всех шагов прямого хода все преобразования коэффициентов и свободных членов проводим по полученным ранее рекуррентным формулам:
 |
( 9.14) |
где
– номер шага прямого хода,
 - номер уравнения систем (9.5), (9.7)
- номер уравнения систем (9.5), (9.7)

В процессе обратного хода из системы (9.12) неизвестные находятся в обратном порядке. Значение корня х4 находят из последнего уравнения системы (9.12). Далее х4 используется для отыскания корня х3 из 3-го уравнения, далее х3 и х4 используются отыскания х2 из 2-го уравнения системы (9.12), и, наконец, х2, х3 и х4 используются для отыскания х1 из 1-го уравнения системы (9.12).
Все вычисления обратного хода проводим в цикле по i, где
 по рекуррентным формулам:
по рекуррентным формулам:

xi= bi.
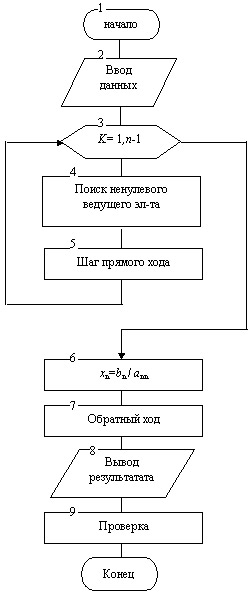
Рассмотренный выше простейший вариант метода Гаусса, называемый схемой единственного деления, обладает следующим недостатком: если ведущий элемент akk какой-либо строки окажется равным нулю, то этот метод формально непригоден, хотя система может иметь единственное решение. Из этих соображений в схеме алгоритма добавлен поиск ненулевого ведущего элемента.
На рисунке 9.1 представлена укрупнённая схема алгоритма (блок-схема) метода Гаусса. На рисунках 9.2 - 9.6 представлены алгоритмы отдельных блоков метода.
Равиль Султанов