|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Инспектор
Вы можете этот курс.
Опубликован: 15.03.2007 | Уровень: специалист | Доступ: платный | ВУЗ: Донецкий национальный технический университет
Лекция 12:
Компьютерное моделирование и решение нелинейных уравнений
Решение дифференциальных уравнений m-го порядка методом Рунге-Кутта (4-го порядка)
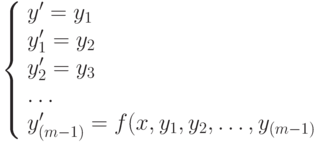
Как уже было сказано, любое дифференциальное уравнение m-го порядка
 |
( 12.15) |
сводится к системе, состоящей из m дифференциальных уравнений 1-го порядка
 |
( 12.6) |
Численным решением системы (12.9), а значит и дифференциального уравнения m-го порядка (12.8) является m табличных функций

т.е. функция y(x) и все ее производные, включая производную (m-1)-го порядка.
При этом каждая из табличных функций определяется на промежутке [a, b] с шагом h и включает n узловых точек. Таким образом, численным решением уравнения (12.8) или системы (12.9) является матрица порядка  , (табл. 12.8)
, (табл. 12.8)
| i | x | y | y1=y', | y1=y''1, | : | y_m-1=y^(m-1) |
|---|---|---|---|---|---|---|
| 0 | x0 | y0 | (y1)0 | (y2)0 | : | (ym-1)0 |
| 1 | x1 | y1 | (y1)1 | (y2)1 | : | (ym-1)1 |
| 2 | x2 | y2 | (y1)2 | (y2)2 | : | (ym-1)2 |
| 3 | x3 | y3 | (y1)3 | (y2)3 | : | (ym-1)3 |
| : | : | : | : | : | : | : |
| n | xn | yn | (y1)n | (y2)n | : | (ym-1)n |
где
m - порядок дифференциального уравнения, равен количеству столбцов матрицы,
n = (b-a)/h - количество шагов интегрирования, равно количеству строк матрицы.
Каждый j -й столбец матрицы - это массив решений одной j -й табличной функции по всем n шагам интегрирования.
Каждая i -ая строка матрицы - это массив решений m табличных функций на одном i -ом шаге интегрирования.
На графике решением дифференциального уравнения m -го порядка (12.8) является совокупность узловых точек. При этом каждому шагу интегрирования, т.е. каждому значению xi,  , соответствуют m узловых точек скоординатами
, соответствуют m узловых точек скоординатами

При построении алгоритма задачи будем как и ранее расчет вести по шагам интегрирования, т.е. в цикле по  При этом, как и ранее, на каждом i -ом шаге цикла будем рассчитывать решение дифференциального уравнения и тут же его печатать. Тогда нет необходимости формировать матрицу решений, а можно ограничиться формированием массива решений (12.15), который соответствует одной i-й строке матрицы:
При этом, как и ранее, на каждом i -ом шаге цикла будем рассчитывать решение дифференциального уравнения и тут же его печатать. Тогда нет необходимости формировать матрицу решений, а можно ограничиться формированием массива решений (12.15), который соответствует одной i-й строке матрицы:
![Y=[y(1), y(2), y(3), \ldots , y(m)],](/sites/default/files/tex_cache/029f708a687ded2bf5d85dc978af1ffe.png) |
( 12.17) |
где
 |
( 12.18) |
Тогда при построении системы дифференциальных уравнений изменится индексация.
Рассмотрим пример (12.19).
Дано дифференциальное уравнение второго порядка
 |
( 12.19) |
С учетом обозначений (12.18) имеем:

Тогда дифференциальное уравнение (12.19) сводится к системе:
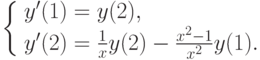 |
( 12.20) |
Вычисление правых частей уравнений системы (12.20) будем выполнять в подпрограмме PRAV. При этом подпрограмма PRAV будет иметь вид
Обращение к подпрограмме
PRAV(m, x, Y, F),
где
m -порядок системы,
x - значение x на i -м шаге интегрирования,
Y=[y(1), y(2), y(3), : , y(m)] - входной массив длиной m,
F=[f(1), f(2),:, f(m)] - результат, массив значений правых частей уравнений системы (12.10) длиной m.
Программу решения системы дифференциальных уравнений реализуем в виде 3-х программных модулей:
- основной программы, в которой организуем циклический процесс по всем шагам интегрирования, ;
- подпрограммы RGK, в которой на каждом i -м шаге реализуется метод Рунге Кутта (4-го порядка) для системы дифференциальных уравнений m -го порядка. Здесь на каждом шаге интегрирования вычисляется массив решений Y длиной m. Для этого внутри подпрограммы RGK организуем циклы по j, где
 ;
; - подпрограммы PRAV, обращение к которой осуществляется из подпрограммы RGK для вычисления массива F длиной m - значений правых частей уравнений системы.
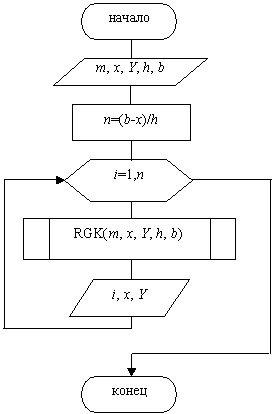
Схема алгоритма основной программы представлена на рис.12.17.
Здесь
m -порядок системы,
h -шаг интегрирования,
n -количество шагов интегрирования,
x -начальное и далее - текущее значение x,
Y -массив длиной m, куда заносим начальные и далее - текущие значения решений системы на одном шаге интегрирования.
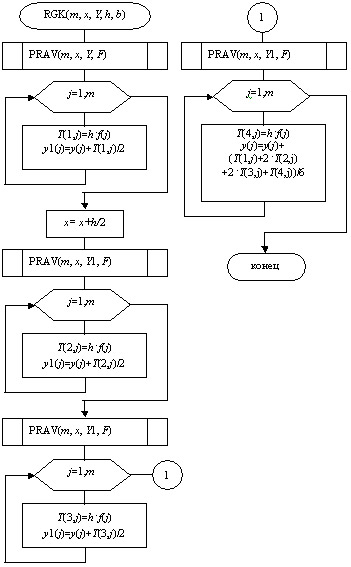
В подпрограмме RGK для вычисления элементов массива Y, используем те же формулы, что и для решения одного дифференциального уравнения 1-го порядка методом Рунге-Кутта (4-го порядка), но с учетом поправки на массивы.
Тогда
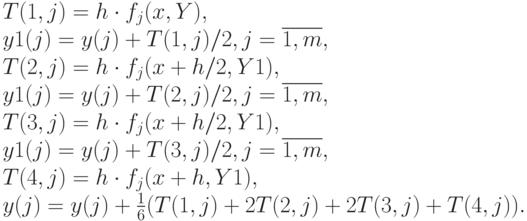
Здесь
Y - массив решений длиной m,
Y1 - рабочий массив длиной m,
T - рабочая матрица порядка (  ).
).
Для вычисления значений fj правых частей дифференциальных уравнений системы перед вычислением каждого элемента матрицы Т на каждом j -ом шаге необходимо выполнить обращение к подпрограмме PRAV.
Схема алгоритма подпрограммы RGK представлена на рис.12.18
Равиль Султанов