|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Инспектор
Вы можете этот курс.
Опубликован: 15.03.2007 | Уровень: специалист | Доступ: платный | ВУЗ: Донецкий национальный технический университет
Лекция 12:
Компьютерное моделирование и решение нелинейных уравнений
Метод Рунге - Кутта 4-го порядка
Самое большое распространение из всех численных методов решения дифференциальных уравнений с помощью ЭВМ получил метод Рунге-Кутта 4-го порядка. В литературе он известен как метод Рунге-Кутта.
В этом методе на каждом шаге интегрирования дифференциальных уравнений искомая функция y(x) аппроксимируется рядом Тейлора (12.4), содержащим члены ряда с h4:

В результате ошибка на каждом шаге имеет порядок h5.
Для сохранения членов ряда, содержащих h2,h3,h4 необходимо определить вторую y", третью y"' и четвертую y(4) производные функции y(x). Эти производные аппроксимируем разделенными разностями второго, третьего и четвертого порядков соответственно.
В результате для получения значения функции yi+1 по методу Рунге-Кутта выполняется следующая последовательность вычислительных операций:

Вывод формулы не приведен. Предоставляется возможность вывод формул выполнить самостоятельно.
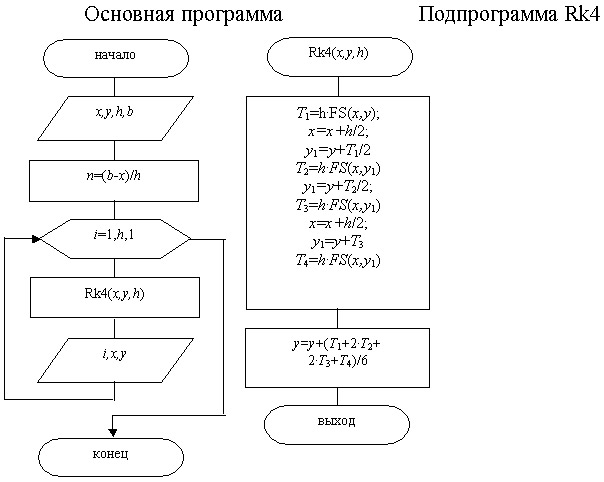
Алгоритм метода Рунге-Кутта (4-го порядка) можно построить в виде двух программных модулей: основной программы и подпрограммы Rk4, реализующей метод (рис 12.14).
Здесь
(x,y) -при вводе начальная точка, далее текущие значения табличной функции,
h -шаг интегрирования дифференциального уравнения,
b -конец интервала интегрирования.
Равиль Султанов