Опубликован: 20.10.2007 | Уровень: специалист | Доступ: свободно
Лекция 3:
Геометрические преобразования
Вращения в плоскости перемещают точки по дуге окружности, центр
которой находится в начале координат. Рассмотрим сначала движение
одной точки при повороте на угол  (положительным является направление
против часовой стрелки), т. е. поворот радиус-вектора на угол (рис. 3.7).
Пусть точка располагалась на расстоянии
(положительным является направление
против часовой стрелки), т. е. поворот радиус-вектора на угол (рис. 3.7).
Пусть точка располагалась на расстоянии  от начала координат, а
ее радиус-вектор составлял угол
от начала координат, а
ее радиус-вектор составлял угол  с осью абсцисс. Тогда координаты
точки определяются формулами
с осью абсцисс. Тогда координаты
точки определяются формулами

После поворота вектор будет составлять угол  , а новые координаты
точки будут определяться соотношениями
, а новые координаты
точки будут определяться соотношениями
 |
( 3.16) |
Можно показать, что при таком преобразовании сохраняются расстояния между точками, а следовательно, и углы между отрезками.
В случае трехмерного пространства рассуждения, касающиеся переноса и масштабирования, полностью аналогичны, только они распространяются на третью координату точек. С вращением же дело обстоит иначе, поскольку здесь вращательное движение есть перемещение вдоль поверхности сферы и поворот на какой-то угол относительно точки нельзя определить однозначно. Но перемещение из одной точки сферы в другую всегда можно осуществить последовательностью поворотов относительно осей координат, поэтому выведем формулы для этих трех вращений.
При повороте относительно оси  на угол у всех точек координата
на угол у всех точек координата  остается неизменной. Если смотреть на плоскость
остается неизменной. Если смотреть на плоскость  со стороны конца
оси , то оси будут расположены так, как показано на рис. 3.8.
Положительным считается поворот от оси
со стороны конца
оси , то оси будут расположены так, как показано на рис. 3.8.
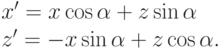
Положительным считается поворот от оси  к оси
к оси  . Если
воспользоваться формулами для плоских поворотов, то координаты
. Если
воспользоваться формулами для плоских поворотов, то координаты  и
и  новой точки определяются выражениями
новой точки определяются выражениями
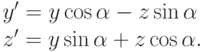
Формулы поворота относительно оси полностью совпадают с теми,
которые были выведены для плоского случая, а поворот относительно оси выглядит так:
Во всех этих формулах следует обратить внимание на знаки, так как они зависят от того, какой поворот считается положительным (в данном случае мы имеем дело с правой тройкой базисных векторов).
Преобразования масштабирования и поворота на плоскости и в
пространстве можно выразить с помощью матриц. Если заданы коэффициенты
масштабирования  , то преобразование точки осуществляется посредством
умножения матрицы на ее радиус-вектор,
, то преобразование точки осуществляется посредством
умножения матрицы на ее радиус-вектор,
 |
( 3.8) |
Поворот на плоскости можно осуществить с помощью матрицы
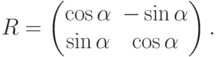 |
( 3.17) |
И наконец, повороты в пространстве относительно осей координат можно выполнить с помощью трех матриц вращения
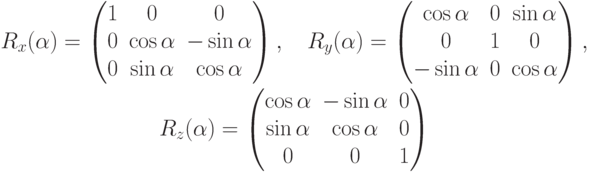 |
( 3.10) |
Нетрудно проверить, что для матриц вращения справедливо соотношение

Для выполнения последовательных поворотов вокруг осей на углы  можно создать матрицу преобразования путем перемножения трех
матриц:
можно создать матрицу преобразования путем перемножения трех
матриц:

Использование этой матрицы даст заметную экономию в вычислениях по сравнению с последовательными умножениями на каждую из трех матриц вращения.
