|
В уравнениях движения кривошипно-шатунного механизма вместо обозначения радиуса кривошипа "r" ошибочно записан символ "?" (гамма). P.S. Может быть это слишком очевидно, но не упомянуто, что угол поворота кривошипа ? считается малым. |
Донецкий национальный технический университет
Опубликован: 15.03.2007 | Доступ: свободный | Студентов: 6215 / 2307 | Оценка: 4.11 / 3.78 | Длительность: 12:32:00
Специальности: Математик
Лекция 10:
Моделирование многомерных нелинейных систем.
Решение систем нелинейных уравнений методом Ньютона
Дана система нелинейных уравнений
 |
( 10.5) |
или

Необходимо решить эту систему, т.е. найти вектор ![\bar X=[x_1,x_2,x_3,\ldots,x_n]](/sites/default/files/tex_cache/daa36d3b268fb974d0f0647de53255fb.png) , удовлетворяющий системе (10.5) с точностью
, удовлетворяющий системе (10.5) с точностью  .
.
Метод Ньютона наиболее распространенный метод решения систем нелинейных уравнений. Он обеспечивает более быструю сходимость по сравнению с методом простых итераций.
В основе метода Ньютона лежит идея линеаризации всех нелинейных уравнений системы (10.5). Сообщим всей системе (10.5) малые приращения hj и разложим каждое уравнение системы (10.5) в ряд Тейлора:
 |
( 10.6) |
где
hj - приращение по каждой xj;
Ri - остаточные нелинейные члены второго и более высоких порядков каждого ряда Тейлора.
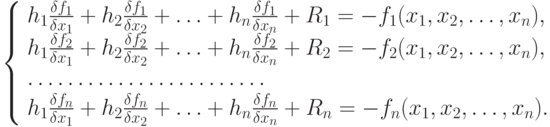
Если приращения hj таковы, что переменные xj принимают значения близкие к корню, то будем считать, что левые части уравнений системы (10.6) обращаются в нули. Тогда отбросив Ri сведем задачу решения системы нелинейных уравнений (10.5) к решению системы линейных уравнений, в которой неизвестными являются приращения hj, 
 |
( 10.7) |
Система (10.7) – система линейных уравнений с неизвестными hj,  . Запишем (10.7) в матричной форме
. Запишем (10.7) в матричной форме

где
![A=\left[ \begin{array}{l}
\frac{\delta f_1}{\delta x_1} \frac{\delta f_1}{\delta x_2} \cdots \frac{\delta f_1}{\delta x_n}\\
\frac{\delta f_2}{\delta x_1} \frac{\delta f_2}{\delta x_2} \cdots \frac{\delta f_2}{\delta x_n}\\
\ldots \ldots \ldots \ldots \\
\frac{\delta f_n}{\delta x_1} \frac{\delta f_n}{\delta x_2} \cdots \frac{\delta f_n}{\delta x_n}
\end{array} \right] \text{ – матрица коэффициентов системы},](/sites/default/files/tex_cache/55847b73c7ea63534ac4c1a4a1ca22e7.png) |
( 10.8) |
![\bar B=\left[ \begin{array}{l} -f_1\\ -f_2\\ \ldots \\ -f_n \end{array} \right] \text{ – вектор свободных членов},](/sites/default/files/tex_cache/c5f25d6b9ff96f3cb8b84739008220b7.png)
![\bar H=\left[ \begin{array}{l}
h_1\\
h_2\\
\ldots \\
h_n
\end{array} \right] \text{ – вектор неизвестных системы}.](/sites/default/files/tex_cache/597ddf3b0129360161bb399b33efac1a.png) |
( 10.9) |
Матрица А, составленая из частных производных  ; называется матрицей Якоби или Якобианом.
; называется матрицей Якоби или Якобианом.
Метод Ньютона состоит из двух этапов:
На первом этапе реализации метода Ньютона необходимо построить систему (10.3).
На втором этапе, начиная с начальной точки  , необходимо решать систему (10.7) на каждом шаге итерационного процесса поиска методом Гаусса. Найденные значения приращений hj используются как поправки к решению, полученному на предыдущем шаге поиска, т.е.
, необходимо решать систему (10.7) на каждом шаге итерационного процесса поиска методом Гаусса. Найденные значения приращений hj используются как поправки к решению, полученному на предыдущем шаге поиска, т.е.
 |
( 10.10) |
или

Итерационный процесс прекращается, как только выполнится условие
 |
( 10.11) |
по всем приращениям одновременно.
Равиль Султанов