Будущее робототехники
Развитие робототехники в будущем можно рассматривать с различных точек зрения, включая технологические, социально-экономические и этико-правовые аспекты.
При этом самый важный для нас аспект - технологический - также целесообразно рассматривать с двух точек зрения - с научно-технологической и технико-экономической.
Хотя в указанных подходах имеются общие черты, научно-технологический в большей мере ориентирован на долгосрочные исследования, государственное финансирование, развитие новых теоретических знаний и научных дисциплин, и в этом смысле носит стратегический характер планирования.
Технико-экономический подход больше связан с решением тактических вопросов - в какие технологии целесообразно вкладывать в среднесрочной и краткосрочной перспективе, какие из них принесут лучший возврат инвестиций, каков будет спрос на продукцию, полученную с помощью тех или иных новаций и как произойдет передел рынка в связи с их появлением.
В данной лекции - последней лекции нашего курса - постараемся кратко остановиться на всех перечисленных аспектах в прогнозировании будущего робототехники.
Куда смотрит вектор долгосрочного развития робототехники?
В данном разделе рассмотрим перспективы долгосрочного развития робототехники, сосредотачиваясь на новых научных направлениях. Как было отмечено в предыдущих разделах, область робототехники включает множество научных направлений. Вопрос о том, какие исследования приведут к наиболее значимым прорывам в развитии робототехники, обсуждается на различных уровнях.
Этот вопрос является актуальным как для мирового сообщества в целом, так и для отдельных стран, которые задаются вопросом: "Как, учитывая наши ресурсы и специфику региона, найти оптимальную стратегию и траекторию развития? Как определить и финансировать исследования, способные стимулировать решение максимального количества практических задач на уровне страны?"
Отвечая на первый вопрос, полезно обратиться к рис. 14.1, где представлено 10 ключевых направлений, которые могут привести к крупным прорывам. Эти задачи-направления были определены на основе экспертного онлайн-опроса по основным нерешенным проблемам в робототехнике.
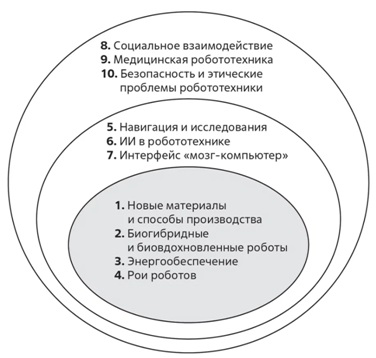
Источник: По материалам [271 ]
Заметим, что в центре диаграммы рис 14.1, где представлены фундаментальные технологии, влияющие на все аспекты развития робототехники, авторы в первую очередь обратили внимание на внедрение новых материалов, создание биогибридных и биовдохновленных роботов.
Отметим также, что магистральные тенденции, в развитии робототехники определяются логикой взаимоотношений между главными акторами развития робототехники (человек, робот и ИИ) и их можно наглядно представить на рис. 14.2.
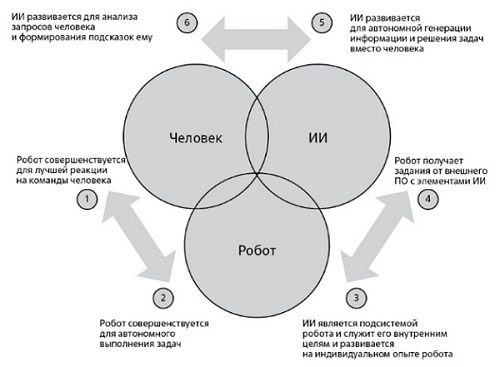
Пересечение кругов на диаграмме Венна (рис. 14.2) показывает главные тенденции. Во-первых, рисунок демонстрирует, что будущее роботов связано с развитием именно умных машин, то есть лежит в области пересечения робототехники и ИИ.
С наступлением эры искусственного интеллекта технологии робототехники, информационные технологии, и искусственный интеллект становятся все более интегрированными.
Начав свою работу в изолированной среде, роботы перемещаются ближе к человеку, функционируя рядом с человеком и в сотрудничестве с ним. Роботы все глубже интегрируются в человеческое общество. Умные машины выступают как средство воплощения ИИ в окружающий физический мир, как инструмент изучения и применения технологии искусственного интеллекта.
Роботы обладающие ИИ в свою очередь позволяют выполнять все более сложные задачи в том числе, помогая моделировать и изучать отдельные аспекты поведения человека.
Также очевидно, что и интеллектуальная и физическая составляющие робота будут совершенствоваться по мере того, как человек будет глубже изучать те механизмы, которые природа воплотила в самом человеке. То есть, человек будет получать возможность реализовывать все более тонкие механизмы строения собственного организма в робототехнических воплощениях.
Помимо этих двух тенденций можно сказать, что в развитии совместной эволюции роботов и ИИ, а также в коэволюции роботов и человека есть и разнонаправленные тенденции, их также удобно проследить на схеме рис. 14.2.
С одной стороны, роботы развиваются как все более совершенный инструмент, управляемый человеком - что можно условно назвать процессом "слияния робота и человека" (пункт 1 рис. 14.2). С другой стороны, роботы эволюционируют как независимые от человека агенты с собственными механизмами принятия решений и в перспективе, вероятно, с собственным внутренним целеполаганием (пункт 2). То есть, в рамках этой логики одни роботы будут становиться частью аугментики1От (Augmenting robots) дословно "роботы-дополнители" - это системы, предназначенные для расширения возможностей человека или помощи ему в выполнении различного рода задач. человека, а другие будут дистанцироваться от него, становясь полностью автономными.
Направление, обозначенное как пункт 1, предполагает развитие интерфейсов "робот-человек", прогнозирует объединение робота и человека в виртуальном и физическом пространстве (управление с помощью естественной речи, жестов, мыслей). В этом процессе робот все больше будет выступать в качестве продолжения тела человека, расширяющего его возможности. Это направление также связано с интерфейсами визуальной и хаптической обратной связи, роботами-аватарами для телеприсутствия, имплантацией умных устройств, протезированием, киборгизацией человека и т. п.
Второе направление (пункт 2) предполагает, что человек будет минимизировать свое влияние на процесс управления роботом, что потребует создание агента с таким уровнем автономности, при котором у робота будут появляться внутренние цели, вероятно, завязанные на оптимальное удовлетворение потребностей этого искусственного организма.
Другая пара противонаправленных тенденций (3-4) показывает, как будет идти коэволюция ИИ и роботов.
Направление, обозначенное как пункт 3 (рис. 14.2), предполагает, что программное обеспечение с ИИ будет развиваться в рамках индивидуального внутреннего воплощенного ИИ, то есть, интегрироваться внутрь контроллера отдельного робота и отвечать за обработку информации от внешнего мира и принятие решений, а персональный опыт "проб и ошибок" станет основой для развития ИИ. Робот будет выступать как способ физической (аппаратной) реализации ИИ, так что жизненный опыт робота будет формировать его внутренний индивидуальный ИИ в процессе освоения мира. Эта тенденция ближе к концепции развития (обучения) отдельного человека, при которой его внутренний опыт служит руководством к действию для решения задач общения с внешним миром, исходя из интересов этого агента2В данном случае агентом является человек.
Направление, обозначенное как пункт 4, предполагает, что программное обеспечение с ИИ будет в большей мере развиваться как внешняя (по отношению к отдельному роботу) система, к которой робот сможет подключаться для получения знаний и решения его задач. В этой концепции облачный (серверный) ИИ получает информацию от любых подключенных систем, в том числе и роботов. Данный коллективный интеллект развивается в процессе получения знаний от различных акторов, в том числе роботов, и разделяет знания между всеми подключенными агентами. Отдельные роботы имеют возможность подключаться к знаниям, которые были получены другими акторами. Внешняя система может разделять задачи между роботами, управлять группами роботов, контролировать их работу. Эта концепция ближе к развитию "коллективного разума", опосредованно определяющего действия отдельных людей.
Человек создан природой так, что знания он набирает сам, путем умственных усилий, а не путем загрузки "чужой" информации непосредственно из интернета. Робот может иметь прямой доступ к знаниям коллектива роботов, к накопленным знаниям, ему не нужно учиться с нуля. Кроме того, робот может быть создан в самых разных формах. Природа создала многообразие животных и только один вид с уникальными умственными способностями, что и определило статус человека как "вершины эволюции". Робототехника вполне может наделить передовыми общими интеллектуальными способностями самых разных роботов - больших и маленьких, ползающих, плавающих и летающих. Каждая из машин сможет заполучить коллективный интеллект, который будет доступен ученым и инженерам на данном этапе развития техники, а "облачные" знания смогут накапливаться и приумножаться усилиями в освоении мира всей совокупностью разных роботов.
Разнонаправленные тенденции можно видеть и на уровне "ИИ - человек" (см. верхняя часть рис. 14.2).
Пытаясь ответить на вопрос - существует ли некий генеральный вектор в развитии робототехники на современном этапе, заметим, что тренд на биовдохновение и слияния робота и человека, отмечен не только в центре диаграммы 141 и на диаграмме 14.2. Тренд на биовдохновение, биоэкономику, экоинновации, на сращивание живых и неживых машин, на более экологичное встраивание искусственных машин в существующую природную экосистему - является глобальным трендом, который выражает суть так называемой пятой промышленной революции рис. 14.3.
В упомянутую тенденцию вписывается и тренд на сотрудничество робота и человека, которое требует от роботов в определенном смысле совместимости с человеком и по механическим, и по скоростным, и по интеллектуальным параметрам.
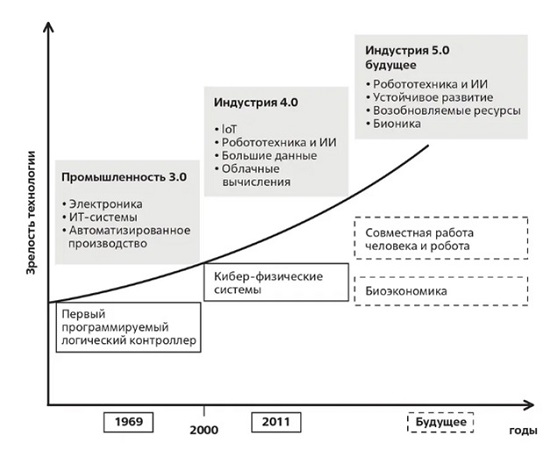
Рис. 14.3. Пятая промышленная революция как курс на устойчивое развитие и более экологичное развитие искусственных машин.
Источник: [272 ]
Учитывая тот факт, что большинство аналитиков связывают основные прорывы в робототехнике с темой биовдохновения, рассмотрим это направление (этот магистральный вектор) немного подробнее и обсудим какие технологические прорывы просматриваются в рамках этого взгляда на развитие робототехники.