Эволюция роботов
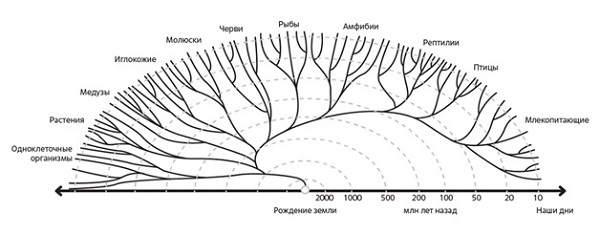
Мы отметили многообразие современных роботов. Не будет большим преувеличением сказать, что своей сложностью схема эволюции данных устройств напоминает картину эволюции животного мира (рис. 2.1), так как в этих процессах можно найти много общего.
Рассмотрим сходные стороны этой эволюции и прокомментируем различия.
Роботы, как и живые существа, занимают все новые ниши в макро- и микромире на земле, в воде, в воздухе.
В животном мире выживают те организмы, которые имеют возможность адаптироваться к окружающим условиям. Роботы в своем развитии тоже приобретают все больше механизмов адаптации к изменяющейся среде.
Живые организмы изменяются под влиянием окружающих их условий обитания. В известной мере так же эволюционируют и роботы - машины, которые лучше справляются с поставленными задачами, продолжают существовать и развиваться, в то время как менее эффективные модели замещаются на более совершенные1Конечно, аналогия с эволюцией в живом мире ограничена в плане движущей силы этого процесса. Говоря о том, что роботы развиваются, мы имеем в виду процесс творческого освоения мира человеком, который создает себе все новые орудия труда..
Конвергенция и дивергенция, подробно описанная в развитии живых существ, проявляется также в развитии робототехники. Как и в животном мире, в процессе эволюции роботов проявляется движение в сторону унификации и стандартизации (группы роботов становятся сходны в своем конструкционном и функциональном исполнении), происходит слияние все большего числа технологий в рамках все более умного устройства (конвергенция).
Одновременно происходит процесс дивергенции (расхождения) - группы роботов развиваются в разные направления и приобретают уникальные свойства, что приводит к возникновению новых форм и типов роботов, которые осваивают все новые ниши. Они научились передвигаться в разных средах (ходить, ползать, плавать, летать), а следом появились модели роботов, которые освоили передвижение во всех средах одновременно рис. 2.2), а также получили уникальную функциональность для использования в разных отраслях промышленности, для предоставления профессиональных и домашних сервисов самого разного профиля.
Рис. 2.2. Разработаны роботы, которые функционируют в разных средах и в том числе в нескольких средах попеременно.
Источник: [29]
В животном мире эволюционирующие организмы наращивают интеллектуальные способности2Под интеллектом у животных понимается совокупность психических функций, к которым относятся мышление, способность к обучению и коммуникации, которые не могут быть объяснены инстинктами или условными рефлексами, чтобы приспособиться к изменяющимся условиям окружающей среды. Роботы также получают развитие с ростом доступного вычислительного оборудования и новых ИИ-моделей, тем самым приобретая большую автономность и широту функциональности. Например, в плане навигации в непредсказуемой среде, ориентации в пространстве, в общении с людьми на естественном языке.
Как видно из рис. 2.1 эволюция живых организмов шла по сложной траектории от простейших до млекопитающих вплоть до появления человека. При этом робототехника началась с макро-масштабов (с размеров, соизмеримых с человеком) и с использования тех конструкционных материалов, которые были на тот период доступны для изготовления роботов (металлы, твердые пластики). Далее робототехника развивалась в разных направлениях. С одной стороны, в область усложнения макромашин, с другой - в область создания миниатюрных машин с упрощенной архитектурой (микро и даже нано масштаба), а также в сторону все большего многообразия используемых материалов (в том числе мягких).
Этапы эволюции
Описать процесс эволюции роботов непросто, так как он включает в себя множество ответвлений. Мы начнем с самой простой абстракции - с попытки представить данную эволюцию в виде линейного процесса, а точнее одной ленты времени, и выделить ключевые технологические этапы в развитии роботов разного назначения. Этот подход наиболее удобен для восприятия, хоть и существенно упрощает картину мира эволюции роботов.
Существуют разные периодизации этапов развития робототехники. Одни авторы выделяют четыре поколения роботов (рис. 2.3), другие пять (рис. 2.4).
Авторы рис. 2.3 связывают поколения эволюции роботов с четырьмя технологическими новациями, которые на рисунке представляются как движущие силы соответствующих этапов - это "промышленная автоматизация", "коллаборативные роботы", "мобильные роботы" и "умные роботы" (роботы с элементами ИИ). Последние две новации относятся к периоду перехода к четвертой промышленной революции, которая позволяет реализовать новые способы производства, совершенствования и распространения продукции на основе внедрения новых технологий, включая Интернет вещей, облачные вычисления, аналитику на основе больших данных, искусственный интеллект.
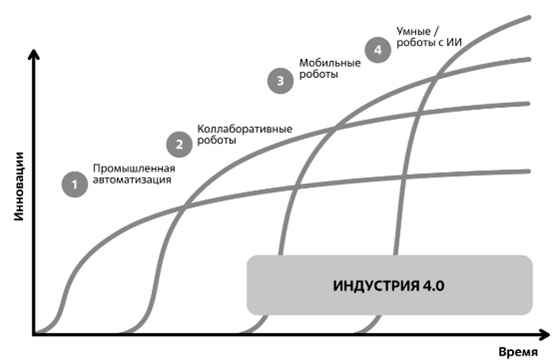
Источник: [30]
Авторы статьи, упомянутой на рис 2.4, предлагают пять периодов в эволюции, и, соответственно, пять поколений роботов.
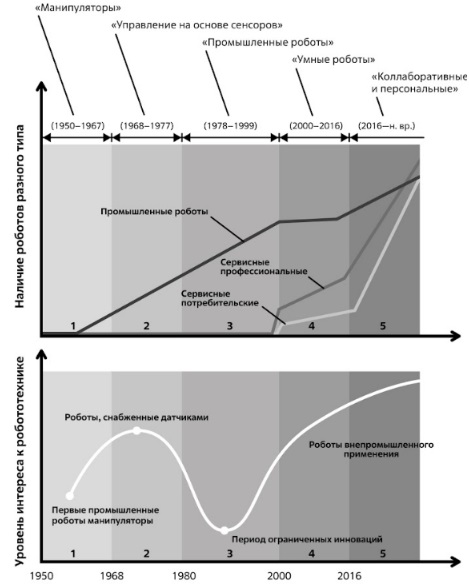
Рис. 2.4. Ключевые периоды развития роботов разного типа (верх) и динамика уровня интереса общества к робототехнике на основе анализа публикаций в СМИ (низ).
Источник: [31]
Мы будем придерживаться периодизации, предложенной на рис. 2.4, так как на неё ссылаются многие аналитики.
Рис. 2.4 показывает, ключевые этапы, динамику роста числа роботов разных типов, а также динамику изменения интереса к робототехнике со стороны общества. Период 1950 - 1967, соответствует росту внимания к этим машинам в связи с применением первых роботов манипуляторов в промышленном производстве. На втором этапе наблюдается всплеск интереса, связанный с использованием сенсоров в роботах, провал на третьем этапе связан с тем, что промышленные роботы развивались без особых революционных новаций, а сервисные были еще мало представлены сообществу. Четвертый и пятый этапы связаны с развитием самых разных роботов, с их использованием во все большем числе индустрий (а также и в домашнем применении), с ростом осведомленности о применениях роботов и экономическом эффекте от их внедрения.
Как видно из рисунка период раннего развития робототехники условно начинается с 1950 г., при этом, говоря о зарождении роботов, следует упомянуть несколько изобретений и научных разработок более раннего времени.
Например, в самом конце 19 века была разработана "торпедная лодка" Николы Тесла, которую изобретатель называл "теле-автоматом". Прототип катера управлялся дистанционно по радио, модель приводилась в движение электродвигателем. Полезной нагрузкой должна была быть взрывчатка. Тесла получил патент под названием "Методы контроля и управляющие устройства для радиоуправляемых плавательных средств и колесных экипажей".
Отдельные проекты в области беспилотных летательных аппаратов и управляемого ракетного оружия также возникали до 1950-х и были ускорены военным временем.
В 1938 г. был создан первый программируемый механизм - краскораспылитель. В середине 1940-х годов появились первые ЭВМ на базе электронных ламп. В это же время зарождается кибернетика - междисциплинарная область исследования, объединяющая системы управления, теории электрических цепей, машиностроение, логическое моделирование, эволюционную биологию, неврологию. Данное научное направление имело большое значение для развития систем автоматизации, теории систем, систем с обратной связью и непосредственно робототехники как их практической реализации.
В 1947 г. был собран первый работоспособный транзистор.
В рамках развития атомного проекта в 1940-х годах потребовалась удаленная работа с радиоактивными материалами, что привело к появлению механических манипуляторов с удаленным ручным управлением. Ряд исследователей в качестве отправной точки появления современных роботов называют именно манипуляторы дистанционного управления, зародившиеся в атомной промышленности. Принципиальная схема механического манипулятора "ведущий-ведомый" представлена на рис. 2.5.
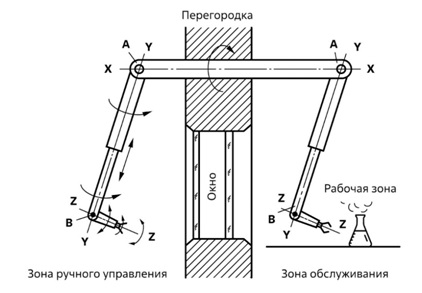
Источник: [32]
Здесь опасная (рабочая зона) отделена от оператора замкнутой камерой, в которой может быть, неприемлемая для человека среда (температура, давление, радиоактивность и т. п.). Перегородка защищает оператора, находящегося на стороне устройства с ручным управлением, от вредного воздействия среды рабочей зоны. Оператор может видеть объект, над которым необходимо выполнять определенные манипуляции через специальное стекло.
В 1949 г. Раймонд Гертц подал заявку на патент на телеуправляемый шарнирный манипулятор от имени Комиссии по атомной энергии США. Развитие ядерной промышленности и ее приложений привело к распространению устройств такого рода.
На рис. 2.4 мы схематично изобразили динамику появления роботов разного типа и динамику интереса к робототехнике со стороны профессионального сообщества на разных периодах эволюции роботов. На рис. 2.6 мы представили те же временные периоды и соответствующие этим периодам ключевые технологические новации, оказавшие важнейшее влияние на развитие робототехники.
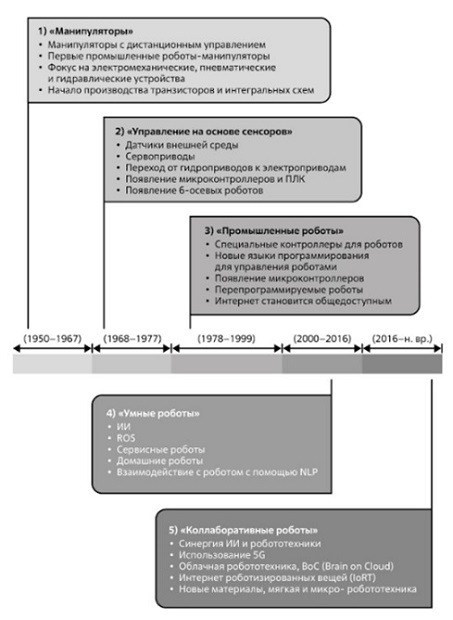
Рис. 2.6. Ключевые периоды развития робототехники и важнейшие технологические события, определившие данные этапы
На рис. 2.4, 2.6 мы представили эволюцию роботов как одномерный процесс. Однако ветвей эволюции множество. Рис. 2.7 иллюстрирует тот же временной процесс, но в виде нескольких параллельных ветвей.
Конечно, указанными на рисунке тремя направлениями не исчерпывается множество траекторий эволюции роботов, но здесь уже можно проследить как во времени роботы осваивали разные ниши.
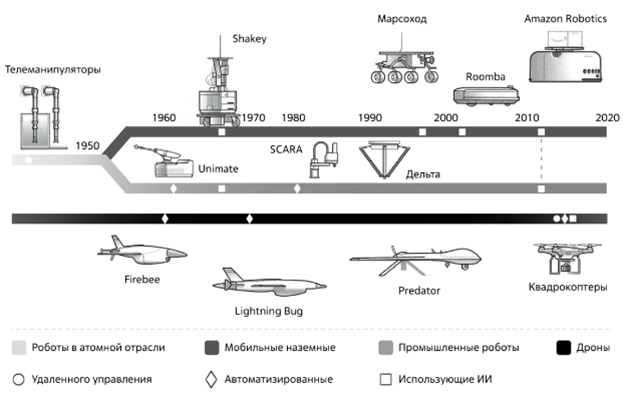
По материалам [33]
Мы представили различную графическую интерпретацию эволюции роботов на промежутке 1950 - 2020 гг., отражающую пять поколений роботов и теперь опираясь на рис. 2.4, 2.6и 2.7 рассмотрим указанные периоды чуть более подробно.
Первый этап (1950 - 1967) - это этап появления первых роботов. Несмотря на то, что робототехника в эти годы находилась в зачаточном состоянии, на данном этапе решались фундаментальные вопросы проектирования нового класса машин. Современных электронных компонентов и компьютерных технологий для разработки роботов еще не было. Этот инструментарий и сама электронная элементная база создавались параллельно. Пятидесятые годы - это период, когда серийное производство транзисторов - ключевых компонентов электроники, которые послужили основой создания процессоров, микроконтроллеров, микросхем только началось.
В 1955 г. появился первый транзисторный компьютер. В конце 1950-х годов происходит переход от отдельных транзисторов к интегральным схемам - множеству транзисторов на одной пластинке полупроводника. В 1959 начался промышленный выпуск кремниевых интегральных схем, что означало начало вступления в эпоху микроэлектроники.
Как мы отметили в этот период происходит развитие телеманипуляторов - устройств, в которых ручное управление манипулятором осуществляется на расстоянии (удаленно) - на первых моделях механически и позднее с использованием проводного и беспроводного соединения.
В 1950-х годах появляются первые манипуляторы с числовым управлением для механической обработки с возможностью хранения в памяти серии запрограммированных команд.
В 1952 г. в Массачусетском технологическом институте был разработан первый станок с ЧПУ (фрезерный станок с числовым программным управлением для малых партий), патент на этот станок был выдан в 1958 г.
Несмотря на описанные прототипы в большинстве источников началом промышленных роботов называют 1954 год, когда Джон Девол, подал заявку на патент3патент выдан в 1963 г. на метод, который был реализован в создании промышленного робота Unimate. В 1961 г. Джон Девол и Джозеф Энгельбергер основали компанию Unimaton, которая произвела первый промышленный робот Unimate, манипулятор с гидравлическим приводом (робот показан среди прочих на рис. 2.4). Манипулятор весил две тонны и управлялся программой, записанной на магнитном барабане.
Unimate содержал контур обратной связи по положению 4Контур обратной связи по положению относится к системе управления, где измеряемое положение робота сравнивается с целевым, и на основе этого сравнения контроллер робота принимает действия по коррекции движения робота, что компенсировать ошибки, возникающие из-за внешних воздействий, и других факторов., в котором перемещения звеньев манипулятора измерялись установленными в них датчиками.
Первый Unimate был установлен на заводе General Motors для извлечения деталей из литейной машины. Последующие версии Unimate использовались для перемещения заготовок и для точечной сварки кузовов автомобилей.
В последующие годы было создан целый ряд компаний по производству манипуляторов в первую очередь для автомобильной промышленности.
В Европе первые промышленные роботы появились в 1967 г. Роботы первого поколения представляли собой программируемые машины с ограниченной функциональностью не имеющими датчиков для связи с внешней средой.
Первые контроллеры для управления промышленными роботами, основанные на электромеханических реле были довольно громоздкими и сложными в обслуживании.
Промышленные роботы первого поколения практически не воспринимали окружающую среду, поэтому для выполнения повторяющихся, задач опирались на обучение по путевым точкам. Программирование роботов осуществлялось путем обучения двигаться "от точки к точке" то есть от одной точки с заданными координатами к другой.
Конечно, промышленные роботы являются центральным элементом обсуждаемого этапа. Однако одновременно велись работы по созданию беспилотных наземных и воздушных аппаратов. В пятидесятые годы развиваются первые БПЛА5В последнее время воздушные беспилотники называют разными терминами: БПЛА (беспилотные летательные аппараты), БЛА (беспилотные летательные аппараты), БАС (беспилотные авиационные системы), БВС (беспилотные воздушные суда) (см. рис. 2.7), которые к роботам не имели прямого отношения, но которые можно считать прообразами современных умных дронов, которые все чаще именуются как "летающие роботы".
В частности, в начале 1950-х в США был построен беспилотный летательный аппарат с реактивным двигателем Ryan Firebee, который использовался в качестве беспилотных мишеней6Первые беспилотные самолеты проектировались в США и СССР еще раньше ( в 1930-1940 годах), например, в ленинградском НИМТИ разрабатывался "планёр специального назначения" ПСН-1 и ПСН-2, который мог нести одну торпеду, запускался с самолёта-носителя (тяжёлый бомбардировщик ТБ-3) и садился на воду. Наведение планёра производилось по инфракрасному лучу.. Позднее были выпущены разведывательные ударные и многоцелевые модификации.