

|
Нахожу в тесте вопросы, которые в принципе не освещаются в лекции. Нужно гуглить на других ресурсах, чтобы решить тест, или же он всё же должен испытывать знания, полученные в ходе лекции? |
Опубликован: 02.09.2013 | Доступ: свободный | Студентов: 429 / 54 | Длительность: 19:27:00
Тема: Программирование
Специальности: Программист, Системный архитектор
Лекция 1: Основные цветовые модели, представление изображения, базовые операции над изображениями
Существуют и другие методы нахождения границ объектов на изображении. Пожалуй, наиболее популярным является метод Канни [4], реализацию которого можно найти в библиотеке OpenCV.
Кроме границ объектов в системах компьютерного зрения часто используются так называемые угловые точки, которые особенно важны для решения задачи слежения за объектом поскольку обладают свойством уникальности в некоторой окрестности.
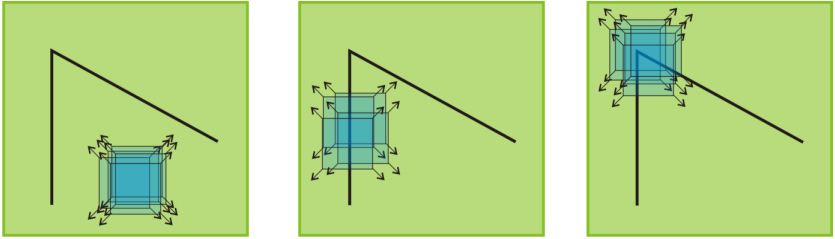
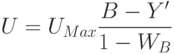
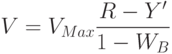
Угловая точка на изображении определяется как точка, некоторая окрестность которой не похожа на окрестности, полученные сдвигом этой точки в любом направлении. На рисунке ниже проиллюстрировано, что в однородной области нет изменений в окрестности точки в любом направлении, если точка на ребре, то нет изменений вдоль ребра, если точка угловая, то сдвиг окрестности точки в любом направлении повлечет изменение.
Математически меру схожести окрестностей можно выразить формулой

где  – сдвиг окрестности,
– сдвиг окрестности,  и
и  - координаты пиксела в окрестности.
- координаты пиксела в окрестности.
Рассмотрим метод представленный в работе [5] для определения положения угловых точек, который реализован в библиотеке OpenCV.
Считая, что  и
и  малы можно записать
малы можно записать

Тогда

или 
где 
в угловых скобках записаны суммы квадратов производных и произведение частных производных.
Известно, что если матрица  имеет большие собственные числа, то квадратичная функция
имеет большие собственные числа, то квадратичная функция  изменяется во всех направлениях, то есть удовлетворяет условию угловой точки.
изменяется во всех направлениях, то есть удовлетворяет условию угловой точки.
Таким образом, алгоритм имеет следующий вид:
Для каждого пиксела вычисляется минимальное собственное число матрицы 
Находятся локальные максимумы в карте минимальных собственных чисел матрицы ,
анализируя окрестность 3 на 3.
Если величина найденного локального максимума превышает заданный порог, то координата этой точки записывается в выходной массив угловых точек.
Часто из-за ошибок экспозиции или из-за погрешностей в освещении изображение получается
малоконтрастным. Рассмотрим алгоритм улучшения контраста, основанный на нахождении
минимального и максимального значений яркости на изображении. Пусть  – максимальное
значение яркости, а
– максимальное
значение яркости, а  – минимальное. Тогда новое значение пиксела можно записать
– минимальное. Тогда новое значение пиксела можно записать
 – старое
значение пиксела. Применяя данное преобразование ко всем пикселам изображения, контраст
повысится, так как минимальная яркость будет 0, максимальная 255, а остальные значения
линейно масштабируются. Ниже изображено исходное изображение и результирующее
изображение с повышенным контрастом.
– старое
значение пиксела. Применяя данное преобразование ко всем пикселам изображения, контраст
повысится, так как минимальная яркость будет 0, максимальная 255, а остальные значения
линейно масштабируются. Ниже изображено исходное изображение и результирующее
изображение с повышенным контрастом.
Другой популярный алгоритм повышения контраста – это эквализация гистограммы. Он состоит из следующих шагов:
- Вычисляется гистограмма
 для исходного изображения
для исходного изображения - Значения бинов гистограммы нормализуются, так что их сумма равна 255
- Вычисляется интеграл гистограммы
 .
. - Полученная интегральная кривая используется в качестве интерполяционной кривой по формуле
 , где
, где  – новое значение пикселя в точке
– новое значение пикселя в точке  – старое значение,
– старое значение,  – интегральная кривая.
– интегральная кривая.
Цветные изображения. Цветовые пространства
Если цветное изображение представить в виде трех одноканальных изображений, то для них применимы все рассмотренные методы обработки полутоновых изображений.
Следует отметить, что не все камеры формируют изображение в формате RGB, многие камеры видеонаблюдения вещают в формате YUV.
В этом формате яркостная составляющая Y выделена в отдельном канале. Две другие U и V несут цветовую информацию. Отметим, что человеческий глаз больше восприимчив к яркостной компоненте, поэтому основная обработка осуществляется для Y канала.
Переход из RGB в YUV и обратно осуществляется линейным преобразованием.



Существуют и другие удобные для анализа и обработки цветовые пространства, переход в которые из RGB может быть нелинейным. Например, рассмотрим пространство HSV, которое удобно тем, что его каналы имеют ясное семантическое значение: H – оттенок цвета (Hue), S – насыщенность цвета (Saturation), V – интенсивность цвета (Value). Таким образом, модифицируя канал S, мы можем управлять насыщенностью цветов на изображении.
Ниже представлены четыре изображения: первое – исходное RGB изображение, второе изображение, у которого в каждом пикселе повышена насыщенность S, третье – увеличена яркость (канал V), четвертое – модифицирован канал H, так что цвета поменяли оттенки.
Андрей Терёхин
Демянчик Иван
|
В главе 14 мы видим понятие фильтра, но не могу разобраться, чем он является в теории и практике. " Искомый объект можно описать с помощью фильтра |
 "
"