| Россия |
Инспектор
Вы можете этот курс.
Опубликован: 26.05.2010 | Уровень: специалист | Доступ: платный
Лекция 13:
Радиосенсоры и радиолокаторы
13.4. Радиолокаторы
Еще одним известным видом радиосенсоров являются радиолокаторы или радары. Их функционирование базируется на излучении импульсов радиоволн, регистрации и анализе их отражений от объектов.
Первый патент на изобретение радиолокатора еще в 1934 году получил шотландский физик Роберт Ватсон-Уат. Особенно быстро радиолокация начала развиваться в годы второй мировой войны и после ее окончания. Тогда радиолокаторы использовались в основном для раннего выявления вражеских самолетов на больших расстояниях.
Радиолокатор всегда имеет минимум четыре блока: генератор радиоимпульсов, антенну для их излучения в заданном направлении и для приёма отраженных от объектов сигналов, усилитель-селектор сигналов и индикатор. Отраженный от объекта радиосигнал запаздывает относительно импульса излучения на время, необходимое для распространения электромагнитной волны к объекту и обратно. Измерив время запаздывания, можно вычислить расстояние до объекта. А структура отраженного сигнала несет информацию о свойствах объекта. По изменению частоты отраженного радиосигнала можно определить, движется ли объект, и вычислить радиальную скорость его движения. Если диаграмма направленности излучения антенны достаточно узка, то можно определить также, в каком направлении находится обнаруженный объект. Для этого антенна радиолокатора должна поворачиваться, сканируя пространство по азимуту или по высоте.
Принцип функционирования радиолокатора требует, чтобы период времени между моментами излучения радиоимпульсов  был больше, чем время прохождения радиоволны туда и обратно на наибольшее расстояние
был больше, чем время прохождения радиоволны туда и обратно на наибольшее расстояние  , на котором локатор может обнаруживать цели. Т.е. должно выполняться условие
, на котором локатор может обнаруживать цели. Т.е. должно выполняться условие
 |
( 13.1) |
 – скорость распространения радиоволн.
– скорость распространения радиоволн.Из-за необходимости все более сложной селекции и обработки сигналов, радиолокаторы уже давно стали интеллектуальными сенсорами.
В зависимости от поставленных задач в радиолокаторах используют следующие частотные диапазоны:
3-30 МГц (длина волны соответственно 100-10 м) – в радиолокаторах береговой охраны и в "загоризонтных" радиолокационных станциях (дальнего обнаружения);
50-1000 МГц (длина волны 6-0,3 м) – для дальнего обнаружения воздушных целей на больших высотах и для исследования поверхности Земли;
1-2 ГГц (длина волны 30-15 см) – для контроля за воздушным движением;
2-8 ГГц (15-3,75 см) – в морских радарах, в метеорологии;
8-12 ГГц (3,75-2,5 см) – для наведения ракет, для картографии средней разрешающей способности, для обслуживания движения самолетов в аэропортах;
12-18 ГГц (длина волны 2,5-1,65 см) – для картографии высокой разрешающей способности, для спутниковой альтиметрии;
27-40 ГГц (длина волны 11-7,5 мм) – в специальных радиолокаторах (например, для управления наземным дорожным движением);
40-100 ГГц (длина волны 7-2,7 мм) – для высокоточных исследований, в сенсорах автоматизированных транспортных средств.
13.4.1. Компактные бортовые радиолокаторы
Сначала радиолокаторы были очень громоздкими. Но с развитием электроники их размеры удалось значительно уменьшить и создать компактные, экономичные радары, удобные для эксплуатации даже на небольших судах (легких самолетах, яхтах и т.п.). Применение микрокомпьютеров позволило сделать радиолокаторы еще более интеллектуальными, использовать всё более изобретательные методы излучения зондирующих радиоимпульсов и обработки отраженных сигналов, которые значительно улучшили эксплуатационные характеристики и надежность радаров.
В качестве примера на
рис.
13.10 показан бортовой радиолокатор Furuno M1712. Его закрытый, рассчитанный на любую погоду, сканер диаметром 46 см может вращаться с угловой скоростью до 24 об./мин. Благодаря наличию микропроцессора на жидкокристаллическом экране с диагональю 17,5 см данные могут быть представлены в 14 различных масштабах от 1/8 до 24 морских миль (вдоль радиуса) – в зависимости от потребности. Погрешность определения расстояний не превышает 1% от максимального значения установленной шкалы расстояний, а погрешность определения азимута – до 1  .
Расстояние до объекта можно определить с помощью концентрических колец расстояния, которые автоматически воспроизводятся на экране, либо с помощью курсора. Для самых точных измерений используют маркер переменного расстояния. Направление на объект также измеряется с помощью этого маркера или "электронного пеленга" – луча, проведенного от центра экрана через центр объекта, который автоматически воспроизводится при наведении курсора на объект. Углы отсчитываются от направления движения судна.
.
Расстояние до объекта можно определить с помощью концентрических колец расстояния, которые автоматически воспроизводятся на экране, либо с помощью курсора. Для самых точных измерений используют маркер переменного расстояния. Направление на объект также измеряется с помощью этого маркера или "электронного пеленга" – луча, проведенного от центра экрана через центр объекта, который автоматически воспроизводится при наведении курсора на объект. Углы отсчитываются от направления движения судна.

Рис. 13.10. Один из компактных современных радиолокаторов для небольших судов Furuno M1712: слева – антенна с генератором радиоимпульсов ("сканер"); по центру – индикатор с блоком селекции и обработки сигналов; справа – фото индикатора, встроенного в пульт управления яхтой
При наличии спаренного с радиолокатором цифрового магнитного или гирокомпаса углы могут отсчитываться также и от направления на магнитный или географический север (по выбору пользователя). Радиолокатор может быть информационно связан с системой спутниковой навигации. Тогда на экране будут отображаться также географические широта и долгота объекта, на который наведен курсор. Небольшие объекты (другие суда, буи, островки и т.п.) отображаются на экране в виде ярких точек.
Наличие микропроцессора сделало возможным сложный "полиэкранный" режим работы. В нижней части экрана может высвечиваться "окно данных", на которое выводится информация от компаса, эхолота, лага, от системы спутниковой навигации и т.п. В других "окнах" можно наблюдать общую радиолокационную картину, цветную навигационную карту с индикацией собственного местонахождения и трассы движения, изображение маршрутов и ориентиров движения с прогнозом времени прохождения. Могут быть выделены также окна для отображения сообщений о погоде, о важных событиях в окружающем регионе, данные от рыбопоисковых эхолотов и т.д. [ [ 214 ] ].
Подобный портативный судовой радиолокатор RADAR 2000, работающий на частоте 9,4 ГГц, описан также на сайте http://www.fordewind.spb.ru/Info/jrc/Radar2000.htm.
В отличие от навигационных радиолокаторов так называемые " георадары " направляют свои радиоимпульсы не в свободное пространство, а в исследуемую среду (в землю, воду, стены и т.п.) [ [ 187 ] ]. Зондирующий радиоимпульс, проходя сквозь среду, отражается от имеющихся в ней неоднородностей. Отраженные радиосигналы несут информацию о структуре среды. При перемещении георадара вдоль поверхности среды формируется картина, которая позволяет определить наличие, местонахождение, глубину залегания и размеры скрытых объектов [ [ 31 ] , [ 32 ] , [ 55 ] ].
На рис. 13.11 слева показана фотография блока обработки сигналов и индикации одного из современных компактных георадаров "ОКА" [ [ 197 ] ].

Рис. 13.11. Индикатор с блоком селекции и обработки сигналов георадара "ОКА" (слева); самодвижущийся сканер с антенной АБ-1700 (справа)
Его назначение – радиолокационное выявление в грунтах, в насыпях, оползнях, под автомобильным или железнодорожным полотном, под водой, во льду и под ним разных структурных неоднородностей, карстовых пустот, промоин, трещин, разломов, инородных тел и т.д. Радар имеет 8 сменных антенных блоков, рассчитанных на разную глубину зондирования и соответственно на разную частоту и продолжительность радиоимпульсов. Среди них имеются и герметичные антенные блоки, рассчитанные на погружение в воду на десятки метров. Низкочастотные антенны используют для исследований на глубину до 10-30 м с точностью определения глубины залегания 0,5 м, а более высокочастотные – для исследований на меньшие глубины (первые метры). Наиболее высокочастотная антенна АБ-1700 излучает импульсы с центральной частотой 1,7 ГГц. Это обеспечивает разрешающую способность 3 см на глубинах до 1 м. Антенные блоки устанавливают на самодвижущуюся тележку, способную перемещаться со скоростью 5-10 м/с, поддерживая радиосвязь с блоком обработки в радиусе до 100 м. На ней установлены автоматические сенсоры перемещения. Для сканирования антенны на большие расстояния тележку цепляют к автомобилю, трактору и т.п. С целью привязки к абсолютным геофизическим координатам предусмотрены связь со спутниковыми навигационными системами GPS и GLONACC.
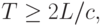
Некоторые примеры применения георадаров приведены на рис. 13.12, 13.13, 13.14. На рис. 13.12 показано изображение, сформированное на жидкокристаллическом экране георадара "ОКА" при исследовании продуктивного слоя мела, который выделен белым цветом [ [ 322 ] ]. Черными линиями выделены профили повышенного отражения радиоволн на границах раздела между разными слоями. Полученные профили позволяют рассчитать запасы мела и определить границы продуктивных залежей.
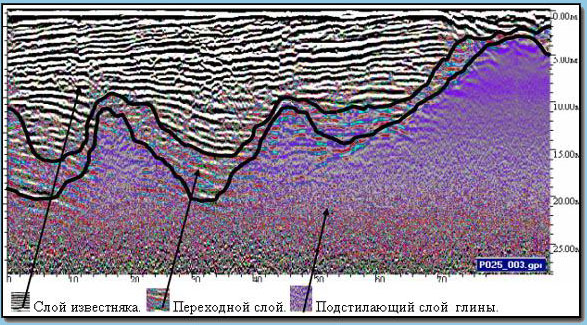
Рис. 13.12. Радиолокационное изображение профилей продуктивного слоя мела на экране георадара "ОКА" с антенной АБ-150
Другой пример можно увидеть на рис. 13.13, где сверху показано первичное радиолокационное изображение, а снизу – уточненное и обработанное изображение после выборочного геологического исследования слоёв и их интерпретации специалистами.
Верхний уровень (0,0 м) соответствует положению поверхности воды в болоте. На отредактированном изображении хорошо видны контуры и размеры продуктивного слоя торфа.
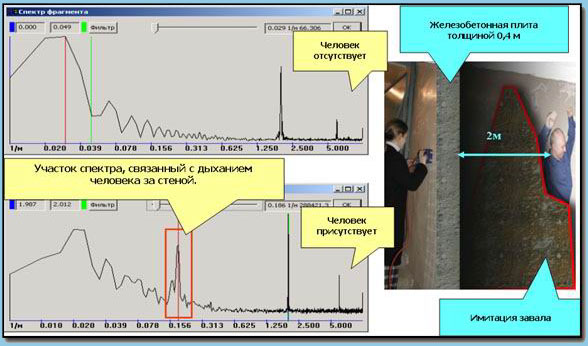
С целью радиолокационного выявления местонахождения людей, которые оказались под завалами после землетрясения или после другой стихийной или техногенной катастрофы, разработан специальный режим зондирования и обработки сигналов. В этом режиме из общего отраженного сигнала вычитается сигнал отражения от неподвижных объектов, находящихся на той же глубине. Благодаря этому достигают высокой чувствительности при выявлении подвижных объектов, например, дыхательных колебаний грудной клетки человека и других его движений. Сигналы от подвижных объектов выделяют по изменению частоты принятых радиосигналов вследствие эффекта Доплера. Этот режим работы показан на рис. 13.14: сверху – уровень сигналов отражения от неподвижных объектов, снизу – профиль разностного сигнала при наличии человека за стенами. Прямоугольником выделен весьма существенный разностный сигнал, обусловленный движениями человека и его грудной клетки.
13.4.3. Широкополосная радиолокация
В георадарах сейчас все шире применяют "широкополосную" (UltraWideBand – UWB) радиолокацию, когда ширина спектра радиосигнала превышает 25 % его центральной частоты. Проще говоря, излучаются лишь несколько периодов колебаний на центральной частоте или короткие одиночные импульсы [ [ 60 ] , [ 112 ] , [ 133 ] , [ 198 ] , [ 225 ] ].
Рис. 13.13. Радиолокационное изображение, полученное на экране георадара "ОКА" с антенной АБ-150 при исследовании торфяного болота (сверху) и его инженерно-геологическая интерпретация на том же экране (внизу)
Широкая полоса частот предопределяет небольшой пространственный размер "волнового пакета" и обусловленную этим высокую пространственную разрешающую способность. Например, радиоимпульсу продолжительностью 0,1 нс соответствует волновой пакет длиной лишь 3 см. Такой "пакет" различает уже сантиметровые детали структуры объекта, от которого он отражается. Короткие импульсы предопределяют также низкую среднюю (во времени) мощность излучения. При средней мощности лишь в несколько милливатт можно обеспечить дальность выявления целей от нескольких метров до километров.
В 1994 году Томас МакЕрван из Ливерморской национальной лаборатории (США) разработал миниатюрный радиолокатор MIR (Micropower Impulse Radar – микромощный импульсный радиолокатор ) с продолжительностью импульсов 200 пс и пространственной разрешающей способностью 1 см. Интервалы времени между излучениями импульсов являются случайными и задаются генератором шума. А прием отраженных сигналов синхронизируется с моментами излучения. Таким образом достигаются: сведение к минимуму помех, создаваемых несколькими одновременно работающими антеннами; очень высокая селективность отбора "своих" сигналов; а также практически незаметная работа радиолокатора, так как его излучение для постороннего наблюдателя сливается с фоновым шумом. Средняя частота излучения импульсов составляет 1-2 МГц. Усреднение по десяткам тысяч – миллионам импульсов повышает соотношение сигнал/шум. Благодаря очень коротким импульсам и большой скважности средняя мощность излучения MIR радиолокатора в сотни раз меньше, чем у мобильных телефонов. Всю его СВЧ электронику удалось разместить на печатной плате площадью около 4 см2.
Используя MIR технологию, Ливерморская лаборатория разработала, например, радиолокационную систему HERMES (High-speed Electromagnetic Roadway Mapping and Evaluation System) для контроля за состоянием бетона и внутренней арматуры мостов. Система состоит из 64 миниатюрных MIR радиолокаторов, смонтированных на метровых штангах слева и справа от оси автомобиля так, что они перекрывают полосу шириной 2 м. Автомобиль движется со скоростью общего транспортного потока, и система на основе получаемой радиолокационной информации формирует трехмерное изображение внутренней структуры покрытия моста с разрешающей способностью до 5 см. Опыт показал, что благодаря высокому контрасту изображения, надежно обнаруживаются трещины в бетоне и арматуре шириной от 1 см.
В той же лаборатории создана радиолокационная система LANDMARC (Land-Mine Detection Advanced Radar Concept) для поиска зарытых в землю противопехотных мин, изготовленных из пластмасс и покрытых резиновой оболочкой, которые невозможно обнаружить с помощью металлоискателя. Для этого несколько миниатюрных MIR радиолокаторов монтируют на легкой штанге, которую переносят вручную, или устанавливают на небольшой роботизированной тележке. При перемещении, оставаясь на высоте порядка 10 см над поверхностью земли, система собирает радиолокационные сигналы отражения, которые после обработки бортовым микрокомпьютером превращаются в двух- или 3-мерное томографическое изображение структуры подземной среды. В "ручном" варианте изображение формируется на мини-экране, подвешенном на шлем оператора, а в роботизированном варианте – на экране пульта управления тележкой. Испытания подтвердили, что система легко отличает пластиковые мины от грунта, камней, корней, останков животных и деревянных предметов. Аналогичная система создана также в шведском Институте оборонительных исследований FOA.
Миниатюрные MIR радиолокаторы уже используются в автомобилях для предупреждения о возможности столкновения, для срочного приведения в действие воздушных подушек безопасности, для помощи при парковке. Начинается их широкое применение в охранных системах для выявления фактов проникновения и присутствия посторонних лиц или животных, в том числе и за стенами помещения.
13.4.4. "Нелинейные" радиолокаторы
В конце ХХ в. стали применять и так называемые " нелинейные радиолокаторы " [ [ 247 ] ]. Принцип их действия основан на том, что нелинейные электронные компоненты при взаимодействии с высокочастотными радиоволнами не только отражают их. Они также генерируют и излучают в виде вторичных волн их "более высокие гармоники", т.е. радиоволны с частотами в целое число раз больше частоты падающей волны. Поэтому по появлению высших гармоник можно обнаружить и установить местонахождение нелинейных электронных компонентов. На рис. 13.15 показан один из современных нелинейных радиолокаторов Orion NGO-4000, предназначенный для поиска и выявления устройств, в состав которых входят полупроводниковые электронные элементы, например, тщательно спрятанных подслушивающих устройств, скрытых видеокамер, записывающих устройств, управляемых по радио взрывных устройств и т.п. ORION обнаруживает скрытые электронные устройства независимо от того, находятся они в работе или отключены. Работой локатора управляет микропроцессор, который организует проверку и автоматически отыскивает свободные рабочие частоты в диапазоне от 850 МГц до 1005 МГц. Радиоволны одной из выбранных частот облучают пространство за антенной, а приемник контролирует отраженный сигнал этой же частоты, а также второй и третьей гармоник. Мощность излучения подбирается автоматически или (по желанию оператора) вручную, начиная от 14 мВт до 1,4 Вт. Круговая поляризация антенны и быстрые изменения частоты обеспечивают выявление полупроводниковых элементов любой ориентации и расположения. Цифровая обработка сигналов позволяет оптимизировать чувствительность локатора.
Результаты измерений интенсивности отраженных сигналов 2-й, 3-й гармоник и основной частоты выводят на дисплей в виде столбчатых диаграмм, как показано на рис. 13.16. Если интенсивность 2-й гармоники выше, чем интенсивность 3-й (справа), то это указывает на присутствие полупроводниковых электронных элементов. А более высокая интенсивность 3-й гармоники ( рис. 13.14 слева) свидетельствует о наличии лишь коррозионных нелинейных контактов между металлами. В случае обнаружения скрытых электронных устройств автоматически подается предупредительный звуковой сигнал в наушники, которые соединены с основным блоком через беспроводный инфракрасный канал связи.

Рис. 13.15. Нелинейный радиолокатор Orion NGO-4000: 1 – антенна с дисплеем; 2 – дисплей; 3 – раздвижная штанга; 4 – основной блок; 5 – наушники; 6 – кейс для упаковки радиолокатора (общая масса 1,6 кг)


Рис. 13.16. Примеры изображений на дисплее радиолокатора Orion NGO-4000