 - конечное
- конечное 
|
Не могу найти требования по оформлению выпускной контрольной работы по курсу профессиональной переподготовки "Менеджмент предприятия" |
Опубликован: 01.09.2009 | Доступ: свободный | Студентов: 1609 / 285 | Оценка: 4.10 / 4.10 | Длительность: 42:50:00
Тема: Менеджмент
Специальности: Менеджер, Руководитель
Лекция 4:
Организационно-экономическая система управления материальными запасами промышленных корпоративных систем
4.3. Управление материальными запасами для нестационарных детерминированных условий
Метод динамического программирования.Чтобы использовать метод динамического программирования в решении приведенной выше оптимизационной задачи, приведем общую постановку задачи динамического программирования [5].
Рассматривается управляемый процесс, в данном случае процесс нахождения оптимальной стратегии управления запасами. В результате управления система (объект управления)  переводится из начального состояния
переводится из начального состояния  в состояние
в состояние  . Предположим, что управление можно разбить на
. Предположим, что управление можно разбить на  шагов, т. е. решение принимается последовательно на каждом шаге, а управление, переводящее систему из начального состояния в конечное, представляет собой совокупность пошаговых управлений. Обозначим через
шагов, т. е. решение принимается последовательно на каждом шаге, а управление, переводящее систему из начального состояния в конечное, представляет собой совокупность пошаговых управлений. Обозначим через  управление на
управление на  -м шаге (
-м шаге (  ). Если управления удовлетворяют некоторым ограничениям решаемой задачи, то такие управления являются допустимыми ( может быть числом, точкой в
). Если управления удовлетворяют некоторым ограничениям решаемой задачи, то такие управления являются допустимыми ( может быть числом, точкой в  -мерном пространстве, функцией, значением качественного признака, иным объектом нечисловой природы).
-мерном пространстве, функцией, значением качественного признака, иным объектом нечисловой природы).
Пусть  - управление, переводящее систему из состояния в состояние . Обозначим через
- управление, переводящее систему из состояния в состояние . Обозначим через  состояние системы после -го шага управления (
состояние системы после -го шага управления (  где
где  - множество всех возможных состояний на шаге ). Получаем последовательность состояний
- множество всех возможных состояний на шаге ). Получаем последовательность состояний  Пошаговый процесс перехода системы из состояния в состояние
Пошаговый процесс перехода системы из состояния в состояние  под действием управления представлен на рис. 4.12.
под действием управления представлен на рис. 4.12.
Для данного процесса действуют следующие положения:
- Состояние системы в конце -го шага зависит от предшествующего состояния
 и управления на -м шаге (и не зависит от предшествующих состояний и управлений). Это требование называется "отсутствием последствия". Сформулированное положение записывается в виде уравнений:
и управления на -м шаге (и не зависит от предшествующих состояний и управлений). Это требование называется "отсутствием последствия". Сформулированное положение записывается в виде уравнений:
( 4.19) которые называются уравнениями состояний.
- Эффективность каждого -го шага также зависит от предшествующего состояния и управления на -м шаге . Обозначим эффективность -го шага через

тогда эффективность всего управления
 определяется как
определяется как
( 4.20)
Задача пошаговой оптимизации (задача динамического программирования) формулируется следующим образом: определить такое допустимое управление  , переводящее систему из состояния
, переводящее систему из состояния  в состояние
в состояние  , при котором целевая функция (4.20) принимает наибольшее (наименьшее) значение.
, при котором целевая функция (4.20) принимает наибольшее (наименьшее) значение.
Решение поставленной задачи с помощью метода динамического программирования заключается в последовательной минимизации целевой функции за 1, 2 и т. д. интервала на основе принципа оптимальности Р. Беллмана: каково бы ни было состояние s системы в результате какоголибо числа шагов, на ближайшем шаге нужно выбирать управление так, чтобы оно в совокупности с оптимальным управлением на всех последующих шагах приводило к оптимальному выигрышу на всех оставшихся шагах, включая данный.
Рассмотрим последовательно определение оптимального управления на шаге  и т. д., используя принцип оптимальности Р. Беллмана.
и т. д., используя принцип оптимальности Р. Беллмана.
Рассмотрим -й шаг:
 - состояние системы к началу -го шага
- состояние системы к началу -го шага 
 - управление на -м шаге;
- управление на -м шаге;
 - целевая функция (выигрыш)
- целевая функция (выигрыш)  го шага.
го шага.
Согласно принципу оптимальности, нужно выбирать так, чтобы для любых состояний получить максимум целевой функции на этом шаге. Обозначим через  максимум целевой функции - показателя эффективности -го шага при условии, что к началу последнего шага система была в произвольном состоянии , а на последнем шаге управление было оптимальным.
максимум целевой функции - показателя эффективности -го шага при условии, что к началу последнего шага система была в произвольном состоянии , а на последнем шаге управление было оптимальным.
 называется условным максимумом целевой функции на w-м шаге:
называется условным максимумом целевой функции на w-м шаге:
 |
( 4.21) |
Максимизация ведется по всем допустимым управлениям .
Решение , при котором достигается , также зависит от и называется условным оптимальным управлением на w-м шаге и обозначается  .
.
Решив одномерную задачу локальной оптимизации по уравнению (4.21) для всех возможных состояний , находятся две функции: и .
Рассмотрим теперь двухшаговую задачу: присоединим к -му шагу (  )-й.
)-й.
Для любых состояний  , произвольных управлений
, произвольных управлений  и оптимальном управлении на -м шаге значение целевой функции на двух последних шагах:
и оптимальном управлении на -м шаге значение целевой функции на двух последних шагах:
 |
( 4.22) |
Согласно принципу оптимальности для любых решение нужно выбирать так, чтобы оно вместе с оптимальным управлением на последнем ( -м) шаге приводило бы к максимуму целевой функции на двух последних шагах. Следовательно, необходимо найти максимум выражения (4.22) по всем допустимым управлениям . Максимум этой суммы зависит от , обозначается через  и называется условным максимумом целевой функции при оптимальном управлении на двух последних шагах. Соответствующее управление на ( )-м шаге обозначается через
и называется условным максимумом целевой функции при оптимальном управлении на двух последних шагах. Соответствующее управление на ( )-м шаге обозначается через  и называется условным оптимальным управлением на ( )-м шаге.
и называется условным оптимальным управлением на ( )-м шаге.
 |
( 4.23) |
С учетом уравнения состояния  значение целевой функции зависит только от
значение целевой функции зависит только от  и . В результате максимизации только по одной переменной согласно уравнению (4.23) вновь получаем две функции:
и . В результате максимизации только по одной переменной согласно уравнению (4.23) вновь получаем две функции:  и
и  .
.
Далее рассматривается трехшаговая задача: к двум последним шагам присоединяется  -й и т. д.
-й и т. д.
Рассмотрим общий случай определения оптимального управления на шаге (  ). Обозначим через
). Обозначим через  условный максимум целевой функции, полученный при оптимальном управлении на
условный максимум целевой функции, полученный при оптимальном управлении на  шагах, начиная с -го до конца, при условии, что к началу -го шага система находилась в состоянии . Фактически эта функция равна:
шагах, начиная с -го до конца, при условии, что к началу -го шага система находилась в состоянии . Фактически эта функция равна:


С другой стороны, целевая функция на  последних шагах (рис. 4.13) при произвольном управлении на -м шаге и оптимальном управлении на последующих шагах равна
последних шагах (рис. 4.13) при произвольном управлении на -м шаге и оптимальном управлении на последующих шагах равна
 |
( s_{k})) |
Согласно принципу оптимальности, выбирается из условия максимума этой суммы, т. е.
 |
( 4.24) |
где  .
.
Таким образом, определив из (4.21) значения  и
и  , а из (4.24) и уравнений состояний (4.19) значения
, а из (4.24) и уравнений состояний (4.19) значения  и соответствующие
и соответствующие  получим последовательности:
получим последовательности:
 -
-
условные максимумы целевой функции на последнем, на двух последних, на  последних шагах и
последних шагах и
 -
-
условные оптимальные управления на -м,  -м,
-м,  ,
,  -м шагах.
-м шагах.
Используя эти последовательности, можно найти решение задачи при данных и . При фиксированном получаем 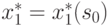 . Далее из (4.19) определяется
. Далее из (4.19) определяется  и т. д.:
и т. д.:

Таким образом, получаем оптимальное решение задачи:

Постановка задачи определения оптимальной стратегии нестационарной детерминированной системы управления запасами для решения методом динамического программирования.Чтобы разработать алгоритм решения поставленной в разделе 4.2 оптимизационной задачи, опишем ее в терминах динамического программирования. Объектом управления в данном случае является рассмотренная выше система управления запасами. Управление системой разбивается на пошаговых управлений
(  - максимальное количество возможных поставок в течение периода планирования
- максимальное количество возможных поставок в течение периода планирования  , увеличенное на единицу).
, увеличенное на единицу).
Управление  , переводящее систему из состояния в состояние , представляет собой величину и момент времени -й поставки.
, переводящее систему из состояния в состояние , представляет собой величину и момент времени -й поставки.
В общем случае величина поставки продукции на склад может принимать множество значений  :
:

где  - объем
- объем  -го варианта поставки продукции.
-го варианта поставки продукции.
Возможные варианты размеров поставок продукции могут быть определены исходя из ограничений (4.17):
 |
( 4.25) |
Общее количество вариантов поставки  .
.
Каждая поставка  может быть произведена в любой момент времени
может быть произведена в любой момент времени  (в общем случае
(в общем случае  ).
).
Таким образом, множество возможных управлений  на шаге можно представить в виде следующей матрицы порядка
на шаге можно представить в виде следующей матрицы порядка  :
:
Управление  представляет собой поставку объемом в момент времени на шаге .
представляет собой поставку объемом в момент времени на шаге .
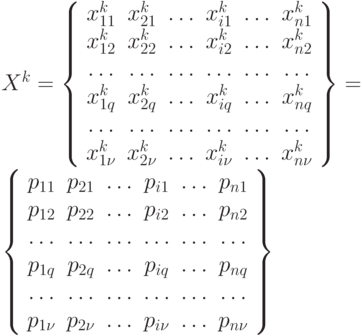
Каждое управление переводит систему в соответствующее состояние  , поэтому размерность множества состояний
, поэтому размерность множества состояний  такая же, как и размерность множества возможных управлений
такая же, как и размерность множества возможных управлений  . Множество возможных состояний можно представить в виде следующей матрицы:
. Множество возможных состояний можно представить в виде следующей матрицы:
Каждое состояние  представляет собой величину запаса
представляет собой величину запаса  в момент времени после поставки
в момент времени после поставки  .
.
Получим уравнение состояний для данной задачи. Из балансового уравнения (2.5)  следует:
следует:
 |
( 4.26) |
Из условия задачи в конце планового периода в момент времени система должна находиться в состоянии  . Тогда из (4.26) следует:
. Тогда из (4.26) следует:

и т. д.
В общем случае получим:
 |
( 4.27) |
Предположим, что под воздействием управления  система переходит из состояния
система переходит из состояния  в состояние
в состояние  , где
, где  - уровень запаса в системе в момент времени
- уровень запаса в системе в момент времени  после
после  -й поставки;
-й поставки;
 - уровень запаса в системе в момент времени
- уровень запаса в системе в момент времени  после -й поставки.
после -й поставки.
Из (4.27) следует:
Преобразовав систему этих двух уравнений, получим:
 |
( 4.28) |
Последняя сумма в данном выражении - сумма поставок с момента (  ) до момента и равна
) до момента и равна  , следовательно:
, следовательно:
Уравнение (4.28) - это уравнение состояний для решаемой задачи.
Выразим эффективность -го шага, которая зависит от предшествующего состояния  и управления на -м шаге , переводящего систему в состояние
и управления на -м шаге , переводящего систему в состояние  . Эффективность -го шага выражается из (4.16) и равна величине совокупных затрат, возникающих на шаге :
. Эффективность -го шага выражается из (4.16) и равна величине совокупных затрат, возникающих на шаге :
 |
( 4.29) |
Первое слагаемое в выражении (4.29) представляет собой стоимость транспортировки товара, поставленного на склад с момента времени ( ) до момента времени , приведенную к началу отчетного периода с учетом дисконтфактора  . Поскольку на шаге при управлении производится всего лишь одна поставка товара в момент времени в размере
. Поскольку на шаге при управлении производится всего лишь одна поставка товара в момент времени в размере  , то:
, то:
 |
( 4.30) |
Преобразуем второе слагаемое выражения (4.29):

Поскольку за период времени с  по
по  запас не пополняется, а только расходуется, то из (4.18) получим:
запас не пополняется, а только расходуется, то из (4.18) получим:
 и т. д.
и т. д.
Таким образом, при  величину запаса в момент можно выразить как:
величину запаса в момент можно выразить как:

В момент времени производится поставка продукции в размере  , поэтому из (4.18) имеем:
, поэтому из (4.18) имеем:

Таким образом, второе слагаемое в выражении (4.29) можно записать как:
 |
( 4.31) |
Подставив (4.30) и (4.31) в (4.29), получим:
 |
( 4.32) |
Величина  в (4.32) - эффективность -го шага, а именно величину совокупных затрат на создание и пополнение запаса с момента
в (4.32) - эффективность -го шага, а именно величину совокупных затрат на создание и пополнение запаса с момента  (начало шага
(начало шага  и до момента c (конец шага , если в момент система находилась в состоянии
и до момента c (конец шага , если в момент система находилась в состоянии  , и затем было выбрано управление .
, и затем было выбрано управление .
Просуммировав для каждого шага  , получим величину совокупных затрат на создание и пополнение запаса в течение планового периода :
, получим величину совокупных затрат на создание и пополнение запаса в течение планового периода :
 |
( 4.33) |
Таким образом, необходимо решить следующую задачу: определить такое допустимое управление , переводящее систему из состояния в состояние , при котором целевая функция (4.33) принимает наименьшее значение.
Михаил Агапитов
Подобед Александр
|
Я нажал кнопку "начать курс" и почти его уже закончил, но для получения диплома на бумаге, нужно его же оплатить? Как оплатить? |