Опубликован: 03.05.2012 | Доступ: свободный | Студентов: 3242 / 781 | Оценка: 4.39 / 4.14 | Длительность: 19:41:00
Тема: Сетевые технологии
Лекция 4:
Цифровая модуляция
Восстановление на приемном конце опорных колебаний и тактовой частоты.
Как мы видели на примерах, реализации демодуляторов требуется наличие местного опорного колебания синхронизированного с передатчиком. Более того, для многоуровневых систем требуется, как правило, и дополнительное опорное колебание в квадратуре к первому. В данном случае восстановление любого опорного колебания осложняется тем, что ФМ в отличие от других видов модуляции в спектре, передаваемого сигнала, не имеет канала, по которому можно передать несущую частоту передатчика. Отсутствие несущей может быть преодолено с помощью методов нелинейного преобразования [ 75 ]
Спектр сигналов ФМ и характеристики ошибок
На рис.4.8 приведены для сравнения спектры сигналов для систем 2-ФМ, 4-ФМ, 8-ФМ, рассчитанных на одинаковые скорости передачи данных.
Напомним, что для системы ИКМ 90% мощности содержится в полосе спектра  (
( –длительность символа исходного сигнала). Высокий процент мощности внутри этой полосы означает, что сигнал может быть заключен в полосе до
–длительность символа исходного сигнала). Высокий процент мощности внутри этой полосы означает, что сигнал может быть заключен в полосе до  , и давать хорошую аппроксимацию идеальной формы сигнала.
, и давать хорошую аппроксимацию идеальной формы сигнала.
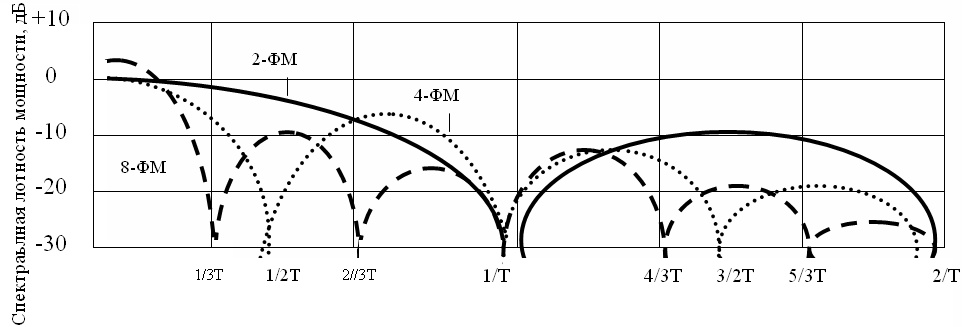
На рис.4.8 видно, что более многоуровневые системы работают при более узком спектре (при более низких скоростях передачи символов, но не битов исходных данных). Так система 8-ФМ передает один символ, содержащий 3 – бита (см. рис. 4.1 ), но имеет спектр в 3 раза меньше чем ИКМ ( ).
).
Теоретически для удобного восстановления требуется сохранить характеристики в середине каждого интервала. Поэтому требуемая ширина полосы частот равна  . Или скорость передачи информации в данной полосе частот равна
. Или скорость передачи информации в данной полосе частот равна

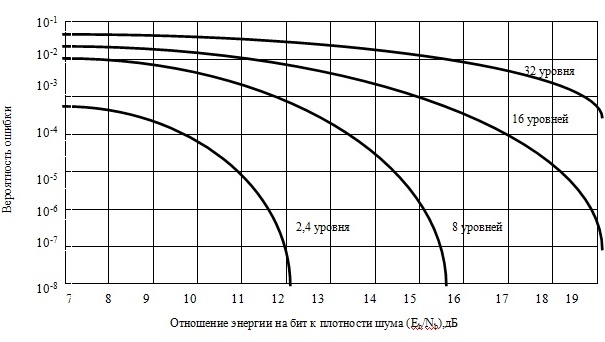
Характеристика ошибок приведена на рис.4.9 .
Чем больше уровней в системе тем, больше нужно иметь отношение энергии на бит к плотности шума (коэффициент сигнал-шум) при равной вероятности ошибки. Например, для получения одной и той же вероятности ошибки для систем 4-ФМ и 8- ФМ требуется для 8-ФМ повысить коэффициент сигнал-шум на 3 дБ.
Базовое выражение, определяющее расстояние между соседними точкам в многоуровневой системе с ФМ, имеет вид:
 |
( 4.6) |
Квадратурно–амплитудная модуляция
Как видно из предыдущих разделов, использование квадратурных сигналов удобно для представления фазовой модуляции с четырьмя и более фазами. В случае 4 ФМ квадратурные сигналы соответствуют отдельным каналам из-за того, что для каждого квадратурного канала первичный сигнал может рассматриваться независимо. В многоуровневых системах с ФМ уровень исходного сигнала для канала I не является независимым от уровня канала Q (см. рис.4.4 и табл. 4.2 ). После приема первичного сигнала, однако, процессы модуляции и демодуляции могут рассматриваться как независимые для всех систем с ФМ.
Квадратурно-амплитудная модуляция - КАМ (QAM – Quadrature Amplitude Modulation) может рассматриваться как расширенная многоуровневая ФМ, в которой два исходных сигнала генерируются независимо. Таким образом, здесь имеют место два полностью независимых квадратурных канала, включающие процессы кодирования и детектирования в основной полосе.
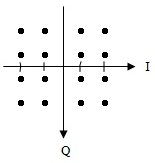
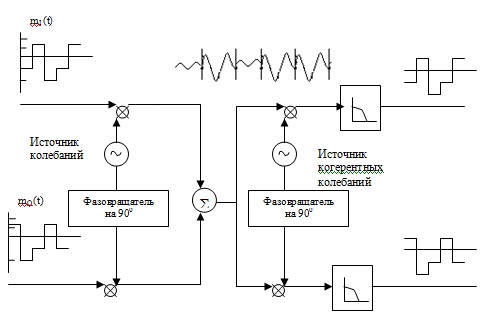
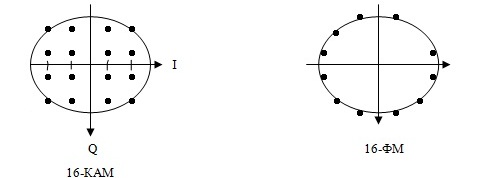
На рис.4.11 показано сигнально - точеное пространство для системы с 16-КАМ и четырмя уровнями в каждом квадратурном канале. Точки представляют составной сигнал, а штрихи на осях отмечают уровни амплитуды в каждом квадратурном канале. Основная схема модулятор – демодулятора 16-КАМ представлена на рис.4.12 .
Отметим, что в отличие от ФМ сигналов сигналы КАМ, показанные на рис.4.12 не содержат постоянной огибающей. Наличие постоянной огибающей в ФМ объясняется поддержанием отношения уровней в квадратурных каналах. В КАМ такие ограничения не вводятся ввиду того, что в каждом канале уровни независимы. Отсюда следует, что КАМ не может использоваться с усилителями, которые могут иметь насыщения в пределах возможных мощностей.
Спектр системы с КАМ определяется спектром исходных сигналов, поступающих в квадратурные каналы. Поскольку эти сигналы в своей основе имеют ту же структуру, что и исходные ФМ сигналы, спектр 16-КАМ и 64- ФМ совпадают при равном числе сигнальных точек на фазовой диаграмме.
Хотя спектры ФМ и КАМ совпадают, характеристики ошибок этих систем сильно отличаются. При достаточно большом числе сигнальных точек системы КАМ имеют, как правило, лучшие характеристики, чем системы с ФМ. Основная причина состоит в том, что расстояние между сигнальными точками на диаграмме для системы с КАМ больше, чем для соответствующей системы с ФМ. На рис.4.13 произведено сравнение систем 16-ФМ и 16-КАМ, работающих на одинаковой пиковой мощности, по расстоянию между точками.
Расстояние  между соседними точками в системе КАМ с нормированной к единице пиковой амплитудой и числом уровней L может быть представлено в виде:
между соседними точками в системе КАМ с нормированной к единице пиковой амплитудой и числом уровней L может быть представлено в виде:
 |
( 4.7) |
n-КАМ имеет преимущество над системой n-ФМ при той же пиковой мощности.
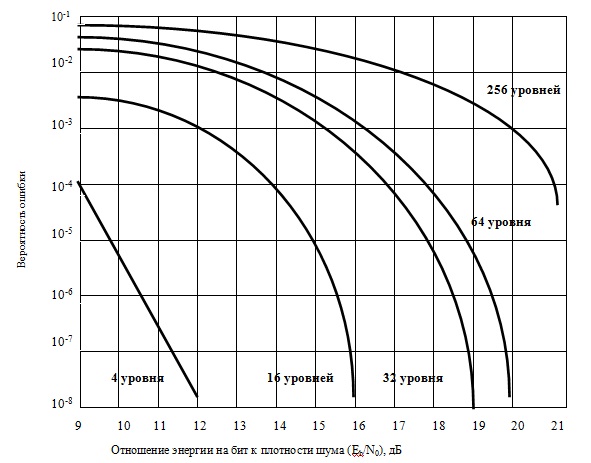
В настоящее время для передачи пользуются системами 256- КАМ. Надо отметить, что надежное функционирование высокоплотных форматов модуляции, таких как 256-КАМ требует строгой линейности усилителей, для возможности обработки широкого диапазона амплитуд сигналов. Соотношения для характеристик ошибок методов 4-,16-,64- и 256 - КАМ в зависимости от отношения функции  приведены на рис.4.14
приведены на рис.4.14