Трехмерная графика с использованием Direct3D
Например, поместить камеру в точку (0,0,-3) и направить "взгляд" наблюдателя в начало системы координат, можно с помощью такого кода:
| C++ |
D3DXMATRIX matView; D3DXVECTOR3 positionCamera, targetPoint, worldUp; positionCamera = D3DXVECTOR3(0,0,-3); targetPoint = D3DXVECTOR3(0,0,0); worldUp = D3DXVECTOR3(0,1,0); D3DXMatrixLookAtLH(&matView, &positionCamera, &targetPoint, &worldUp); device->SetTransform(D3DTS_VIEW, &matView); |
| Pascal |
var matView: TD3DMatrix;
positionCamera, targetPoint, worldUp : TD3DXVector3;
…
positionCamera := D3DXVector3(0, 0, -3);
targetPoint := D3DXVector3(0, 0, 0);
worldUp := D3DXVector3(0, 1, 0);
D3DXMatrixLookAtLH(matView, positionCamera, targetPoint,
worldUp);
device.SetTransform(D3DTS_VIEW, matView); |
Таким образом, все объекты сцены будут теперь описаны в системе координат камеры (наблюдателя). Если положение и параметры камеры не меняются в течение работы приложения, то вызов функции SetTransform с параметром D3DTS_VIEW производится один раз.
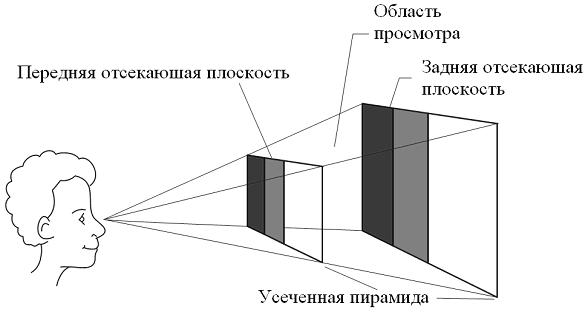
Последним этапом преобразования при получении 2D изображения является операция проекции. Библиотека поддерживает работу как с перспективной, так и с ортогональной проекциями. Для работы с первым типом проекций предназначена функция D3DXMatrixPerspectiveFovLH(), для ортогональных же проекций нужна функция D3DXMatrixOrthoOffCenterLH(). Мы рассмотрим примеры работы с перспективной проекцией. Матрица перспективной проекции задает положение передней и задней отсекающих плоскостей, искажения, имитирующие перспективу. Прототип функции D3DXMatrixPerspectiveFovLH() приведен ниже.
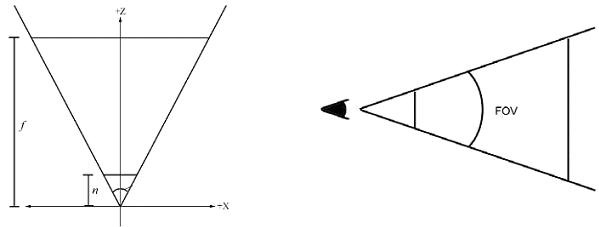
D3DXMatrixPerspectiveFovLH( matProj, // результат fov, // вертикальный угол обзора aspect, // отношение ширины окна к высоте zn, // расстояние до передней отсекающей плоскости zf // расстояние до задней отсекающей плоскости )
Ниже приведены иллюстрации, которые поясняют значение последних четырех аргументов данной функции.
Для установки перспективной матрицы необходимо вызвать метод SetTransform с первым параметром D3DTS_PROJECTION. Приведенный ниже пример, создает и устанавливает матрицу проекции со следующими параметрами: вертикальный угол обзора – 45 градусов, расстояние до передней и задней отсекающих плоскостей – 1 и 100 единиц соответственно.
| C++ |
D3DXMATRIX matProj; D3DXMatrixPerspectiveFovLH(&matProj, D3DX_PI/2, width/height, 1, 100); device->SetTransform(D3DTS_PROJECTION, &matProj); |
| Pascal |
var matProj: TD3DXMatrix; D3DXMatrixPerspectiveFovLH(matProj, pi/2, Width/Height, 1, 100); device.SetTransform(D3DTS_PROJECTION, matProj); |
Если параметры проецирования не меняются в течение работы приложения, то вызов функции SetTransform с параметром D3DTS_PROJECTION выполняется единожды.
Таким образом, конвейер преобразований вершин объекта может быть описан следующей блок-схемой:
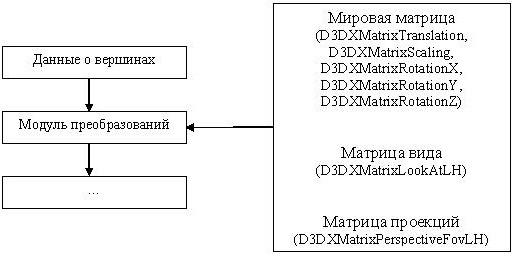
Каждая вершина трехмерной сцены подвергается следующему преобразованию V' = V*matWorld*matView*matProj, где V – исходная вершина, V' - преобразованная вершина.