
| Украина |
Инспектор
Вы можете этот курс.
Опубликован: 27.12.2010 | Уровень: специалист | Доступ: платный
Лекция 6:
Кривые и поверхности в компьютерной геометрии, II
B-кривые
Определение 6.1.4. B - кривой порядка m, построенной по вершинам  с весами
с весами  называется кривая
называется кривая
определяемая опорными точками  весами
весами  и последовательностью узлов
и последовательностью узлов 
Определение 6.1.5. Множество узлов  называется расширенным множеством узлов B -кривой.
называется расширенным множеством узлов B -кривой.
Замечание 6.1.4.
Управляющими параметрами B -кривой являются:
- порядок кривой m,
- ее опорные точки
- веса опорных точек

-
неубывающая последовательность вещественных чисел

Таким образом, B -кривые обладают дополнительным множеством управляющих параметров по сравнению с рациональными кривыми Безье - расширенным множеством узлов. Именно эти дополнительные параметры и обеспечивают гораздо большую гибкость в управлении B -кривыми, чем кривыми Безье. В современной компьютерной геометрии в основном применяются именно B -кривые.
- В отличие от кривых Безье, B -кривые, вообще говоря, не проходят через свои крайние опорные точки. Однако такого прохождения нетрудно добиться с помощью следующего утверждения.
Теорема 6.3. Если первые m узлов расширенного множества совпадают, то B -кривая начинается в своей первой опорной точке  Аналогично, если последние m узлов расширенного множества совпадают, то B -кривая заканчивается в своей последней опорной точке
Аналогично, если последние m узлов расширенного множества совпадают, то B -кривая заканчивается в своей последней опорной точке 
B -кривые в пакете Mathematica. Mathematica имеет встроенные функции BSplineFunction и BSplineCurve, которые позволяют строить B -кривые по заданному множеству опорных точек пространства  автоматическим или полуавтоматическим подбором параметров. Расширенное множество узлов по умолчанию подбирается автоматически, однако его можно задать самому с помощью параметра SplineKnots. Например,
автоматическим или полуавтоматическим подбором параметров. Расширенное множество узлов по умолчанию подбирается автоматически, однако его можно задать самому с помощью параметра SplineKnots. Например,  означает автоматический подбор расширенного множества узлов, а
означает автоматический подбор расширенного множества узлов, а  задает расширенное множество узлов непосредственно.
задает расширенное множество узлов непосредственно.
Так же дело обстоит и с весами опорных точек. Веса можно задавать с помощью SplineWeights. Например,  означает автоматический выбор весов, а
означает автоматический выбор весов, а  задает конкретные веса для шести опорных точек.
задает конкретные веса для шести опорных точек.
Порядок сплайнов можно задавать с помощью SplineDegree, но при этом должно быть 
Вычисление порядка происходит так. Число сплайнов в базисе, равное n - m (см. выше), должно равняться числу опорных точек. Поэтому порядок сплайнов может быть вычислен как разность числа узлов и числа опорных точек. Однако для Mathematica эта разность должна быть подобрана так, чтобы она равнялась 4, иначе B -кривая может быть построена в Mathematica неправильно.
Чтобы воспользоваться возможностью полноценного управления B-кривой, в том числе и весов, нужно запрограммировать B -кривую самостоятельно с помощью встроенной функции BSplineBasis.
Задача 6.1.6. С помощью встроенных функций Mathematica SplineFunction и BSplineCurve построить B -кривую по заданным опорным точкам с автоматическим выбором узлов на плоскости и в трехмерном пространстве.
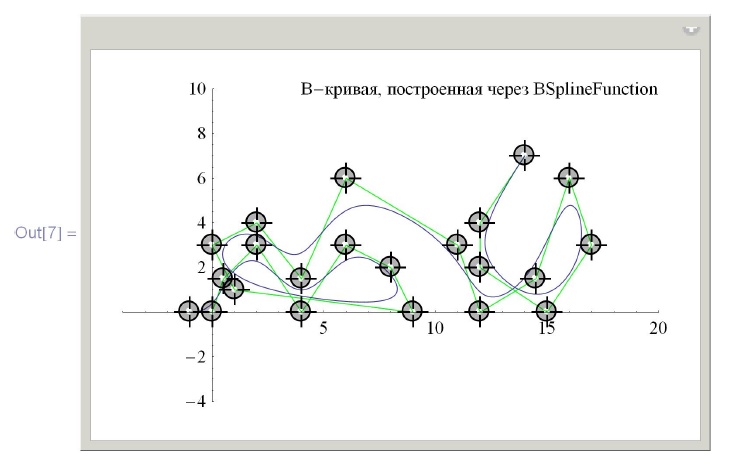
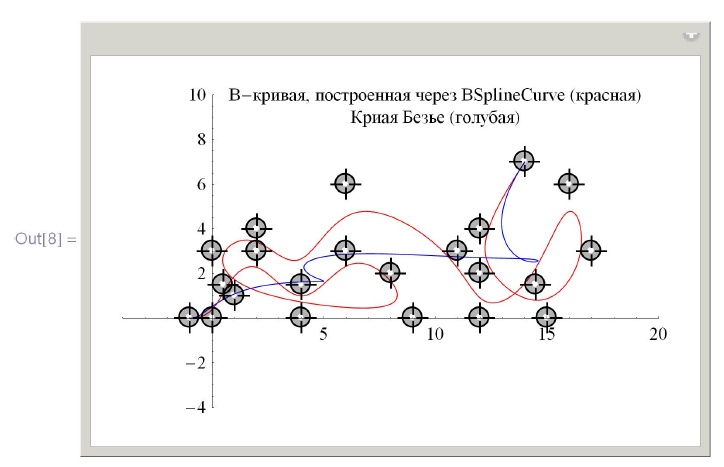
Пример 6.1.4. B -кривая на плоскости с автоматическим выбором узлов, построенная двумя способами: с помощью функций BSplineFunction и BSplineCurve соответственно. На втором графике для сравнения нарисована также простая кривая Безье, построенная по тем же опорным точкам.
In[7] : = DynamicModule [ {ptsO, f, g, n, ptsl, pts2 , t} ,
n = Length [ptsO] ;
Manipulate[f = BSplineFunction[ptsl] ;
Show[{
Graphics[{Green, Line[ptsl], Black,
Text["B-кривая, построенная через BSplineFunction", {12, 10-0}],
Text[ToString[# - 1] , ptsl [ [#] ] +{0.7, 0}] & /@ Range [n] } ,
PlotRange -> {{-4, 20}, {-4, 10}}, Axes -> True] ,
ParametricPlot[f[t], {t, 0, 1}]}, ImageSize -> 300] ,
{{ptsl, pts0}, Locator}],
Initialization : -> (
pts0 = {{-1, 0.0}, {0, 0}, {0.5, 1.5), {2.0, 3.0}, {4, 0}, {6, 3.0},
{8.0, 2.0}, {9.0, 0}, {1.0, 1.0}, {0.0, 3.0}, {2.0, 4.}, {4.0, 1.5},
{6.0, 6.0}, {11, 3}, {12.0, 0.0}, {14.5, 1.5}, {16, 6}, {17.0, 3.0},
{15.0, 0.0}, {12.0, 2.0}, {12.0, 4.0}, {14.0, 7.0}})]In[8] :=
DynamicModule [ {ptsO , f, g, n, ptsl, pts2 , t} ,
n = Length [ptsO] ;
Manipulate[g = BezierFunction[pts2];
Show [ {
Graphics [ {Red, BSplineCurve [pts2 , SplineKnots -> Automatic] , Black,
Text["В-кривая, построенная через BSplineCurve (красная)", {10, 10.0}],
Техt["Криая Беэье (голубая)", {10, 9.0}],
Text [ToSt ring] # - 1] , pts2 [ [#] ] + {0.7, 0}] & /@ Range [n] } ,
PlotRange -> {{-4, 20} , {-4, 10}} , Axes -> True] ,
ParametricPlot[g[t] , {t, 0, 1}, ElotStyle -> {Blue}]
}, ImageSize -> 300] , { {pts2 , pts0}, Locator}], Initialization: -> (
pts0 = {{-1, 0.0}, {0, 0}, {0.5, 1.5}, {2.0, 3.0}, {4, 0}, {6, 3.0},
{8.0, 2.0}, {9.0, 0}, {1.0, 1.0}, {0.0, 3.0}, {2.0, 4.}, {4.0, 1.5},
{6.0, 6.0}, {11, 3}, {12.0, 0.0}, {14.5, 1.5}, {16, 6}, {17.0, 3.0},
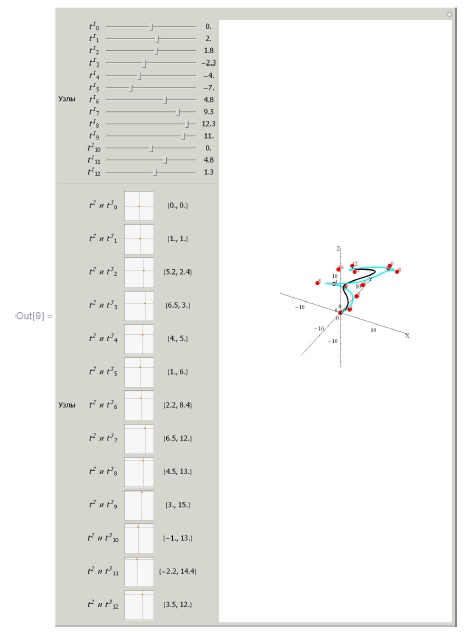
{15.0, 0.0}, {12.0, 2.0}, {12.0, 4.0}, {14.0, 7.0}})]Пример 6.1.5. B -кривая в пространстве с автоматическим выбором узлов в сравнении с кривой Безье, построенной по тем же опорным точкам. Обратите внимание, насколько более послушно ведет себя B -кривая при управлении опорными точками, чем кривая Безье. Кривая Безье по-другому - более глобально - усредняет влияние опорных точек на кривую, что делает ее локальное управление за счет смещения отдельных опорных точек гораздо более вязким, чем в случае B -кривой.
In[9]:=
DynamicModule [ {pts0 , f, pts , n} ,
Manipulate[f = BezierFunction[pts];
Show[
{Graphics3D[{Cyan, Thick,
BSplineCurve[pts, SplineKnots -> Automatic], Red,
PointSize[Large], Point[pts],
Text[ToString[#- 1] , pts [ [#] ] + {0.4, 0.4, 0.4}] & /@
Range[n], Black, Text["X", {18, -0.3, -0.3}],
Black, Text["Y", {-0.3, 18, -0.3}], Black,
Text["Z", {-0.3, -0.3, 18}]}, Axes -> True,
AxesEdge -> Automatic, AxesOrigin -> {0, 0, 0}],
ParametricPlot3D[f[t], {t, 0, 1}, PlotStyle -> {Thick}]},
Boxed -> False,
PlotRange -> {{-18, 18}, {-18, 18}, {-18, 18}}],
{{pts, pts0, "Уэлы"},
With[{r = Range[1, n] } ,
Grid[{Spacer[3] , Subscript[style["t1", Italic] , #- l] ,
Slider [Dynamic@pts [[#1]] [ [1] ] , {-15, 15, .01},
Appearance -> "Left", ImageSize -> {200, 12}],
Dynamic@pts[[#1]] [[1]]} & /@ r] ] &,
ControlPlacement -> Left} ,
Delimiter, {{pts, pts0, "Узлы"},
With [ {r = Range [1, n] } ,
Grid[
{Spacer [3], Subscript [style ["t2 и t3", Italic], #-l],
Slider2D [Dynamic® {pts[[1]] [ [2] ] , pts[[1]] [ [3] ] } ,
{{-15, -15}, {15, 15}}, Appearance -> "Left",
ImageSize -> {50, 30}],
Dynamic@ {pts [[#1]] [ [2] ] , pts [[#2]] [[3]]}} & /@ r] ] &,
ControlPlacement -> Left}] ,
Initialization : ->
(pts0 = {{0.0, 0.0, 0.0}, {2.0, 1.0, 1.0}, {1.8, 5.2, 2.4},
{-2.3, 6.5, 3.0}, {-4.0, 4.0, 5.0}, {-7.0, 1.0, 6.0},
{4.8, 2.2, 8.4}, {9.3, 6.5, 12.0}, {12.3, 4.5, 13.0},
{11.0, 3.0, 15.0}, {0.0, -1.0, 13.0}, {4.8, -2.2, 14.4},
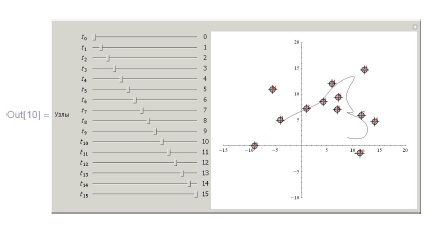
{1.3, 3.5, 12.0}}; n = Length[pts0])]Пример 6.1.6. B -кривая на плоскости с автоматическим выбором порядка, но с управляемыми мышью опорными точками и узлами (узлы должны быть неубывающими).
In[10]:=
DynamicModule [ {pts0, tt0, n, m, f, tt, i, pts},
pts0 = {{-9.0, 0.0}, {-4.0, 5.0}, {1.1, 7.2}, {4.3, 8.5}, {6.0, 12.0},
{12.1, 14.7}, {7.2, 9.4}, {11.5, 5.9}, {7.0, 7.0}, {14.1, 4.7},
{11.2, -1.4}, {-5.5, 10.9}};
tt0 = Table[i - 1, {i, 1, 16} ] ; n = Length[pts0] , m = Length[tt0] ;
Manipulate [f = BSplineCurve [pts , SplineKnots -> tt] ;
Show[{If[OrderedQ[tt],
Graphics[f, Axes -> True, PlotRange -> {{-15, 20}, {-10, 20}}],
Do [If [tt[[i- 1]] > tt[[i]], tt[[i-1]] = tt[[i]] , {i, 2, m}] ;
Graphics [f , Axes -> True],
],
Graphics[{Red, Point[pts],
Text[ToString[# - 1] , pts [[#]] + {0.4, 0.4}] & /@ Range [n] } ,
PlotRange -> {{-15, 20} , {-10, 20}}] }] ,
{{pts, pts0}, Locator}, {{tt, tt0, "Узлы"},
With[{r = Range[l, m] } ,
Grid[
{Spacer[3] , Subscript [Style ["t" , Italic] , # - 1] ,
Slider [Dynamic@tt[[#l]] , {0, 15, .01}, Appearance -> "UpArrow" ,
ImageSize -> {200, 12}], Dynamic@tt[[i]]} &/@r]] &,
ControlPlacement -> Left}] , Initialization: -> (
pts0 = {{-9.0, 0.0}, {-4.0, 5.0}, {1.1, 7.2}, {4.3, 8.5}, {6.0, 12.0},
{12.1, 14.7), {7.2, 9.4}, {11.5, 5.9}, {7.0, 7.0}, {14.1, 4.7},
{11.2, -1.4}, {-5.5, 10.9}};
tt0 = Table [i - 1, {i, 1, 16} ] ;
n = Length[pts0];
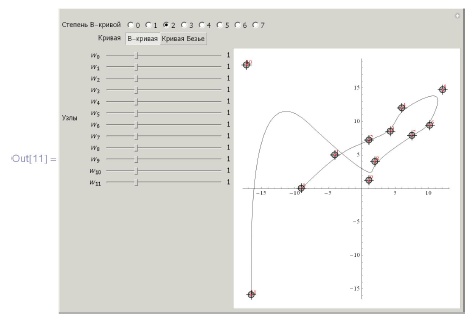
m = Length[tt0])]Пример 6.1.7. B -кривая на плоскости с автоматическим выбором порядка и узлов, но с управляемыми мышью опорными точками и весами, и простая кривая Безье, управляемая теми же опорными точками:
In[11]: =
DynamicModule [ {pts0, n, w0, f, g, d, curve, w} ,
pts0 = {{-9.0, 0.0}, {-4.0, 5.0}, {1.1, 7.2}, {4.3, 8.5}, {6.0, 12.0},
{12.1, 14.7}, {10.2, 9.4}, {7.5, 7.9}, {2.0, 4.0}, {1.1, 1.2},
{-17.2, 18.4}, {-16.5, -15.9}};
n = Length [pts0] ; w0 = Table [1, {i , 1, n} ] ;
Manipulate[f = BezierFunction[pts] ;
g = BSplineCurve [pts , SplineWeights -> w, SplineDegree -> d] ;
Show[
Graphics[{Red, Point[pts],
Text [To St ring [# - 1] , pts [ [#]]+{0.4,0.4}] & /@ Range [n] } , Axes -> True] ,
If [curve = = = 1, Graphics [g] ,
ParametricPlot[f [t] , {t, 0, 1}, PlotStyle -> {Red} ] ] ] ,
{{d, 2, "Степень В-кривой" } ,
Dynamic@RadioButtonBar [Dynamic [d] , Range[0, 7]] &} ,
{{curve, 1, "Кривая"} , {1 -> "В-кривая" , 2 -> "Кривая Безье" } } ,
{{pts, pts0}, Locator},
Delimiter, {{w, w0 , "Узлы"},
With [ {r = Range [1, n] } ,
Grid[{Spacer[3] , Subscript[Style["w", Italic], # - 1] ,
Slider [Dynamic@w[[#1]] , {0, 4, 0.01}, Appearance -> "Left" ,
ImageSize -> {200, 12}], Dynamic @ w[[#1]] } &/@ r] ] &,
ControlPlacement -> Left}] , Initialization : -> (
pts0 = {{-9.0, 0.0}, {-4.0, 5.0}, {1.1, 7.2}, {4.3, 8.5}, {6.0, 12.0},
{12.1, 14.7}, {10.2, 9.4}, {7.5, 7.9}, {2.0, 4.0}, {1.1, 1.2},
{-17.2, 18.4}, {-16.5, -15.9}};
n = Length [pts0] ; w0 = Table[l, {i, l,n}])]Задача 6.1.7. Самостоятельно запрограммировать B -кривую с помощью встроенной функции BSplineBasis, так, чтобы можно было воспользоваться возможностью полноценного управления B -кривой. Обеспечить возможность произвольного допустимого порядка B -сплайнов.